

Three-dimensional point cloud reconstruction device and method based on multi-fusion sensor
A 3D point cloud and sensor technology, applied in the direction of instruments, 3D modeling, details involving processing steps, etc., can solve problems such as point cloud noise, registration technology failure, large data error 3D model, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0080] It should be noted that, in the case of no conflict, the embodiments in the present application and the features in the embodiments can be combined with each other. The present invention will be further described in detail below in conjunction with the drawings and specific embodiments.
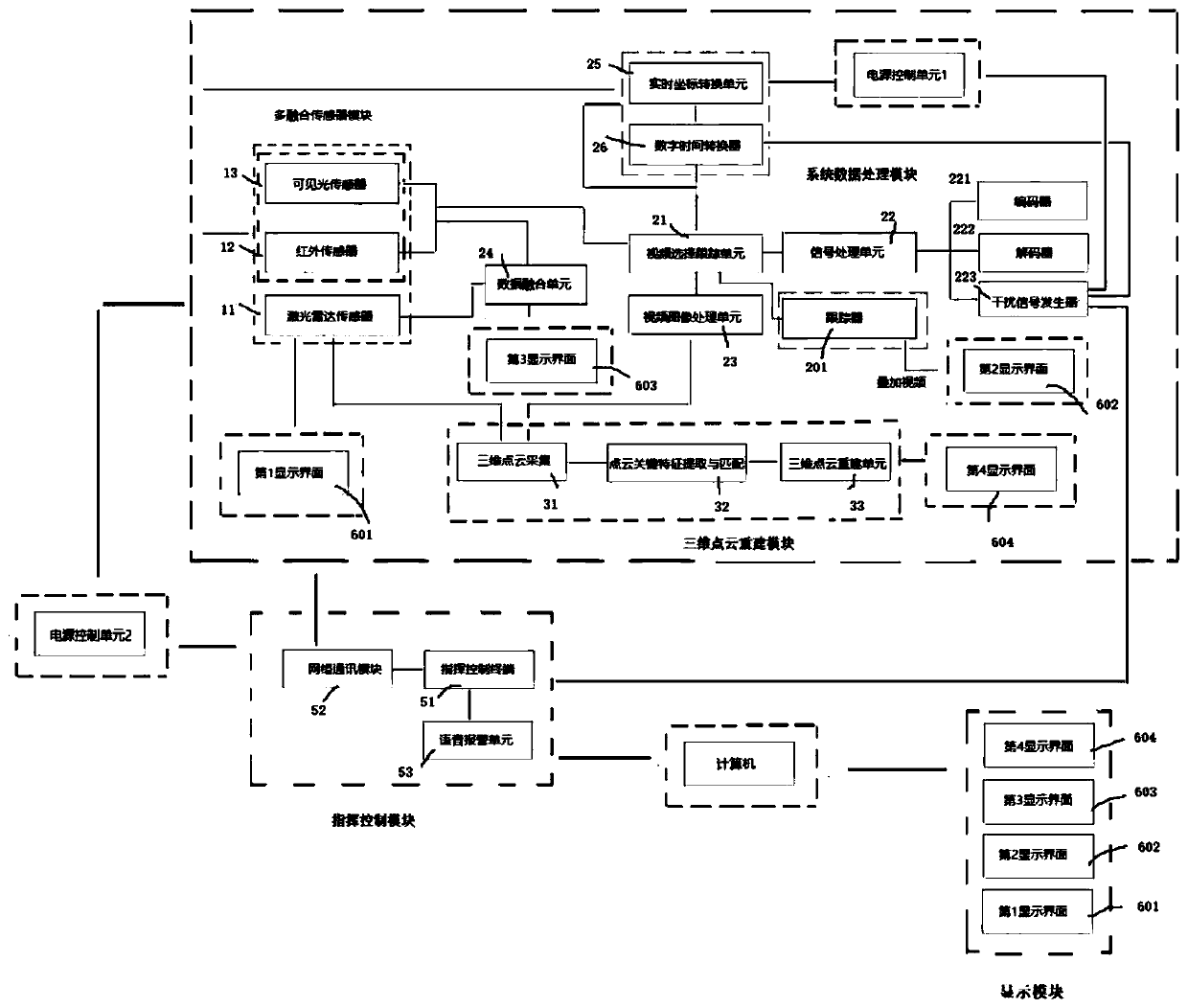
[0081] figure 1 It is a system device structure diagram of a multi-fusion sensor-based three-dimensional point cloud reconstruction device of the present invention, which mainly shows:
[0082] (1) Multi-fusion sensor module, including: lidar sensor 11, infrared sensor 12, visible light sensor 13, for detecting and identifying the target, according to the fusion image of the detected target object and the target position are measured simultaneously, so that the position information and Corresponding to the color texture information; the laser mine sensor 11 is connected to a reflector, and by setting different angles, the target is fully scanned, and the radar is used to scan repeatedl...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More