Control and obstacle avoidance method for robot cluster
A robot and cluster technology, applied in the field of robotics, can solve problems such as the limited capability of individual robots
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
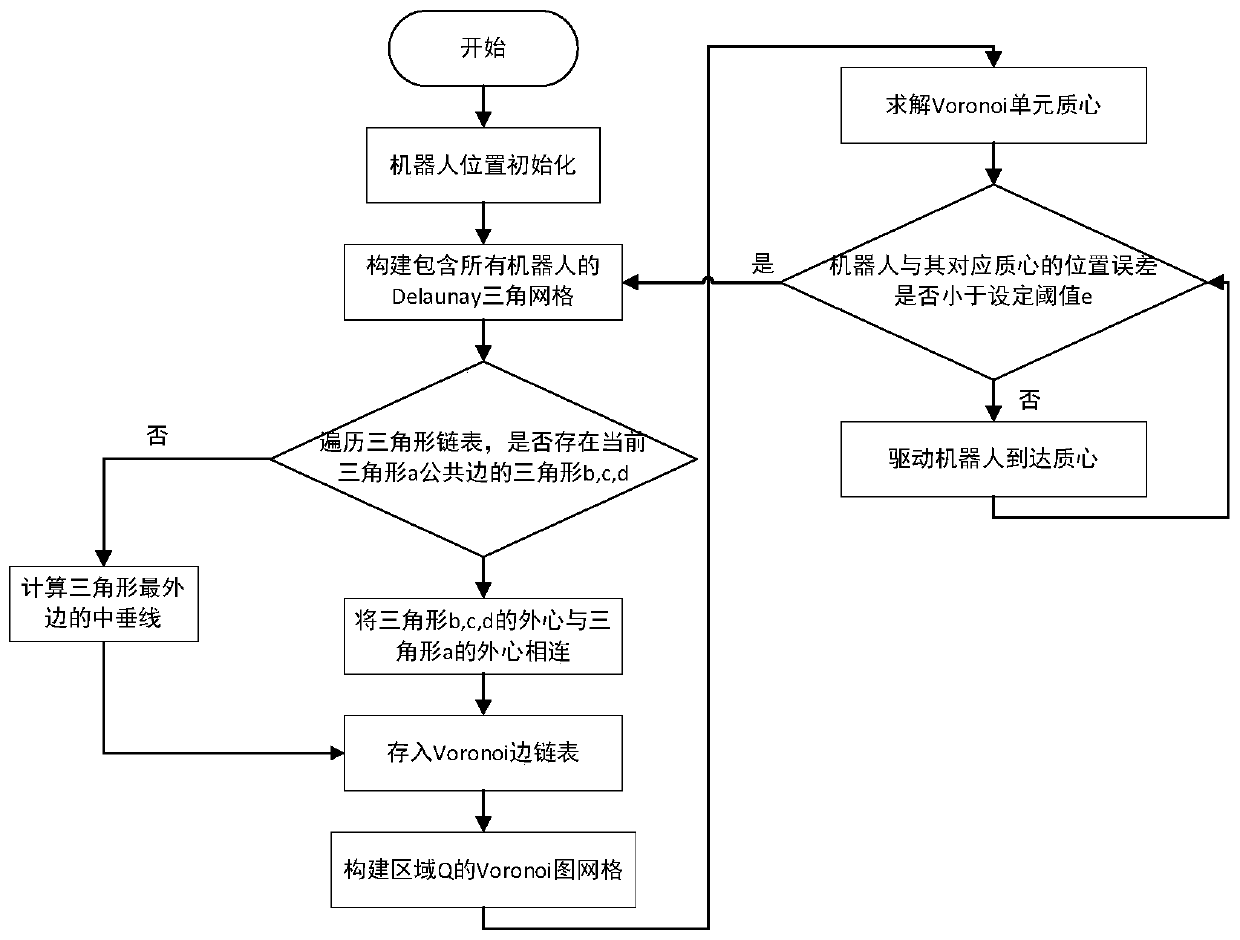
Method used
Image

Examples
Embodiment Construction
[0021] The present invention will be further described in detail below through specific embodiments in conjunction with the accompanying drawings. Wherein, similar elements in different implementations adopt associated similar element numbers. In the following implementation manners, many details are described for better understanding of the present application. However, those skilled in the art can readily recognize that some of the features can be omitted in different situations, or can be replaced by other elements, materials, and methods.
[0022] The present invention uses SLAM technology to obtain the map information of the task area. SLAM technology is a technology for the robot to realize its own positioning, that is, synchronous positioning and map construction. When the robot moves to an unknown space, it estimates the current position by detecting the surrounding environment and at the same time The method to draw the map.
[0023] The two-dimensional grid map con...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More