

Method for controlling rolling angle of underwater robot
A technology of underwater robot and control method, applied in electric controllers, controllers with specific characteristics, etc., can solve problems such as fuzzy, limited control system sensitivity and stability, and less research on attitude control roll angle control, etc. To achieve the effect of improving control accuracy and stability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
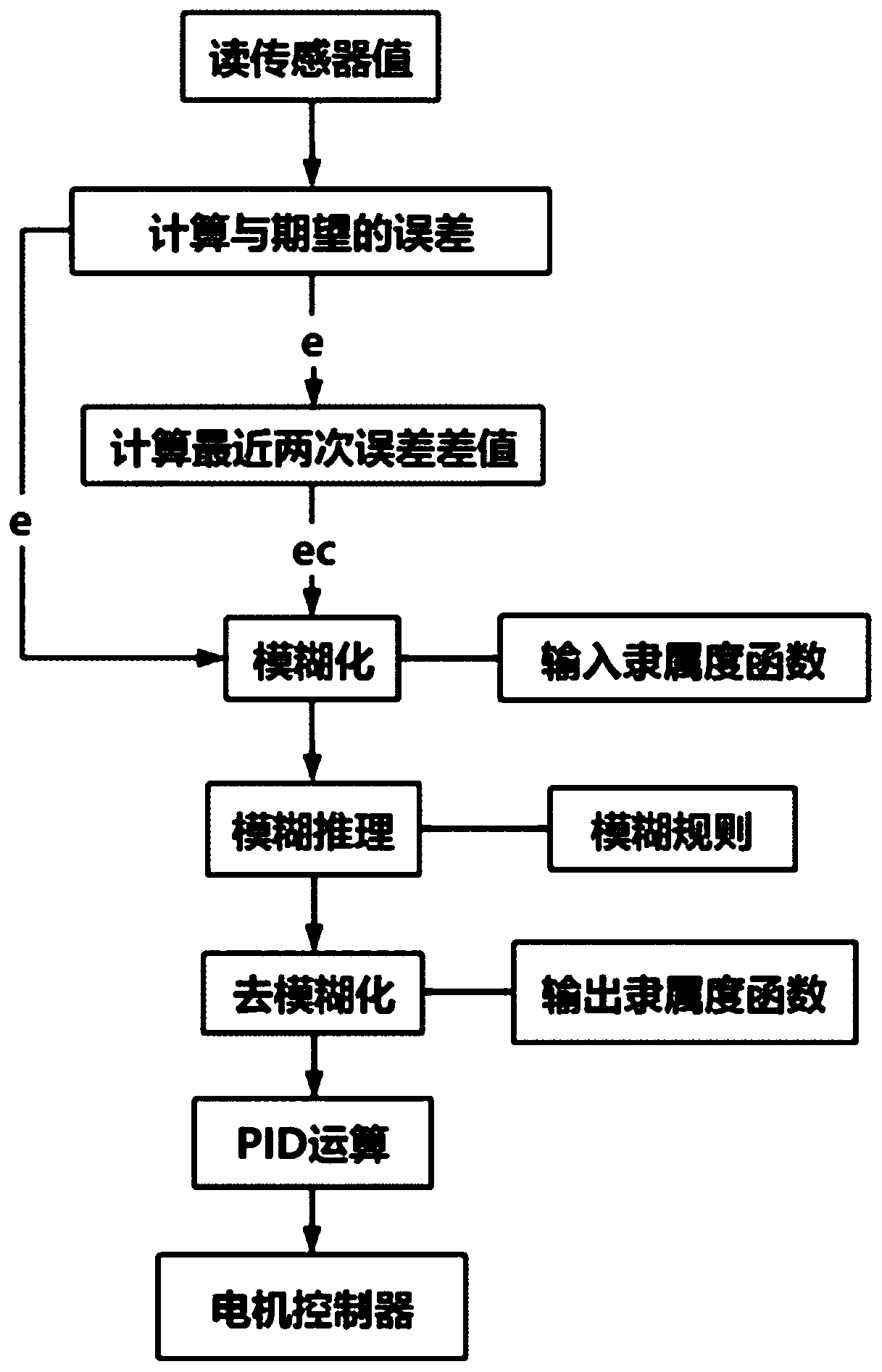
[0037] like figure 1 As shown, a method for controlling the roll angle of an underwater robot includes the following steps:
[0038] (1) input preprocessing;
[0039] (2) Fuzzy logic controller processing process;
[0040] (3) The PID controller processes the process and outputs it to the actuator.
[0041] In step (1), the input preprocessing process is specifically:
[0042] (11) Kalman filtering is performed on the data collected by the attitude sensor
[0043] (12) Set the timer to calculate the error e and the error change ec regularly.
[0044] The Kalman filter can smooth the readings of the attitude sensor, and more accurately estimate the current attitude of the underwater robot in a variable underwater environment. The timer makes the calculation time intervals of e and ec consistent, which facilitates the calculation of the subsequent discrete PID controller.
[0045] In step (2), the fuzzy logic controller process specifically includes the following steps:
...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More