Straight driving cycle-oriented real-time optimal torque distribution control method for 4-wheel independent driving electric vehicle
A four-wheel independent drive, electric vehicle technology, applied in the direction of electric vehicles, control drives, control devices, etc., can solve the difficulty of real-time acquisition of road adhesion coefficient, affect vehicle power and braking performance, and unfavorable real-time performance of vehicle control, etc. question
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
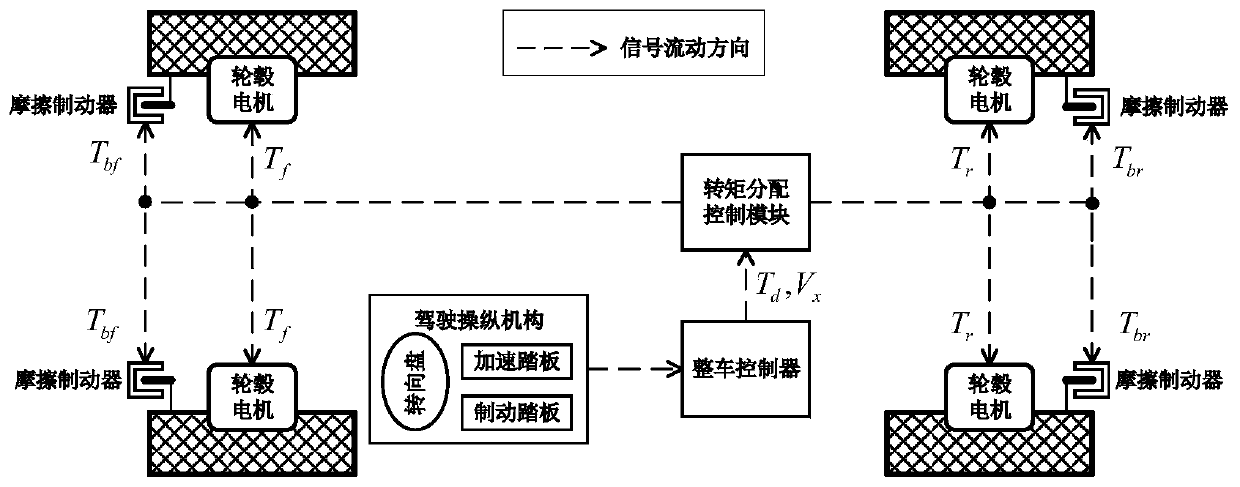
[0104] figure 1 As shown, the control method of the present application is applied in the specific form of the torque distribution control module. The torque distribution control module is functionally connected with the vehicle controller, the motor controller of the hub motor and the friction brake controller, and the vehicle The driver's demand torque T analyzed by the controller d According to the current vehicle speed information V x To optimize the distribution of torque, the distributed front wheel motor torque T f , rear wheel motor torque T r and front wheel friction braking torque T bf , Rear wheel friction braking torque T br , respectively sent to the controller of the corresponding actuator, so as to realize the driving and braking control of the car.
[0105] What needs to be pointed out here is that the so-called torque distribution module and the vehicle controller are divided functionally, which does not mean that the relevant functions must be placed in ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More