A water area cruise system based on svm and kalman filter for fish dynamic prediction
A technology of Kalman filtering and dynamic prediction, which is applied in the fields of radio wave measurement system, surveying and navigation, sound wave reradiation, etc., can solve the problems of low automation, large equipment size, and the inability to realize intermittent feeding of fish, etc., to achieve The effect of reducing the number of detection devices, improving work efficiency and modernization
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
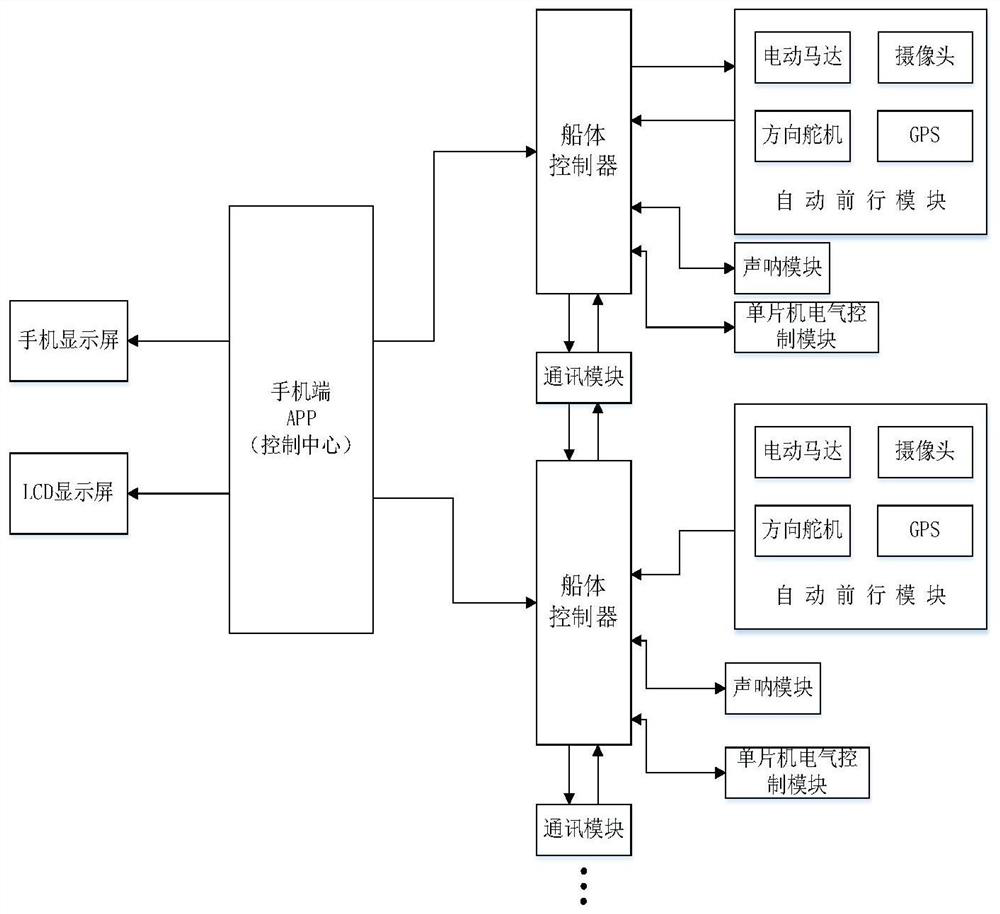
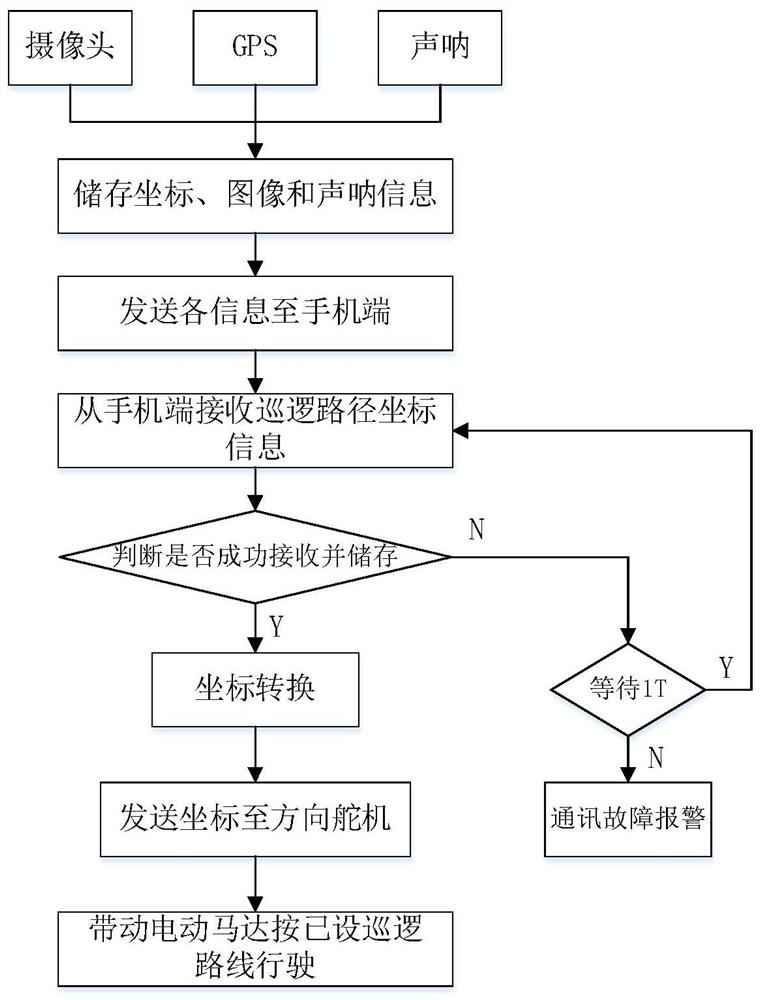
[0109] Such as figure 1 and 2 Shown, the water area cruising system of the fish dynamic prediction based on SVM and Kalman filtering of the present embodiment, it comprises:
[0110] Multiple cruise ships, each cruise ship is equipped with a hull controller, an automatic forward module, and a sonar module. The automatic forward module includes an electric motor, a camera, a steering gear, a GPS module, an electric motor, a camera, a steering gear, a GPS module, The sonar module communicates with the hull controller; the sonar module is used to detect fish school information, and the fish school information includes fish school location information and distribution density information; the camera is used to collect water environment information; the GPS module is used to obtain the position information of the cruise ship ; Electric motors and rudder gear are used to control the operation of the cruise ship;
[0111] The control center communicates with the hull controller of ...
Embodiment 2
[0214] The difference between the water area cruising system based on SVM and Kalman filtering fish dynamics prediction of this embodiment and embodiment one is:
[0215] The hand-held terminal and the control center are designed separately, and the control center acts as a background server to process the algorithm; the hand-held terminal acts as the medium for command transmission and the initiation of the command, reducing the pressure on the data processing of the hand-held terminal.
[0216] Other structures and contents can refer to Embodiment 1.
Embodiment 3
[0218] The difference between the water area cruising system based on SVM and Kalman filtering fish dynamics prediction of this embodiment and embodiment one is:
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com