

Exoskeleton robot power-assisted control system and method based on neural network
An exoskeleton robot and neural network technology, which is applied in the information field of wearable exoskeleton equipment, can solve the problems of online real-time rate and algorithm simplicity cannot be guaranteed, the control effect of exoskeleton robot is not stable enough, and it consumes a lot of training time.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0062] The present invention will be further described in detail below in conjunction with the accompanying drawings and specific embodiments.
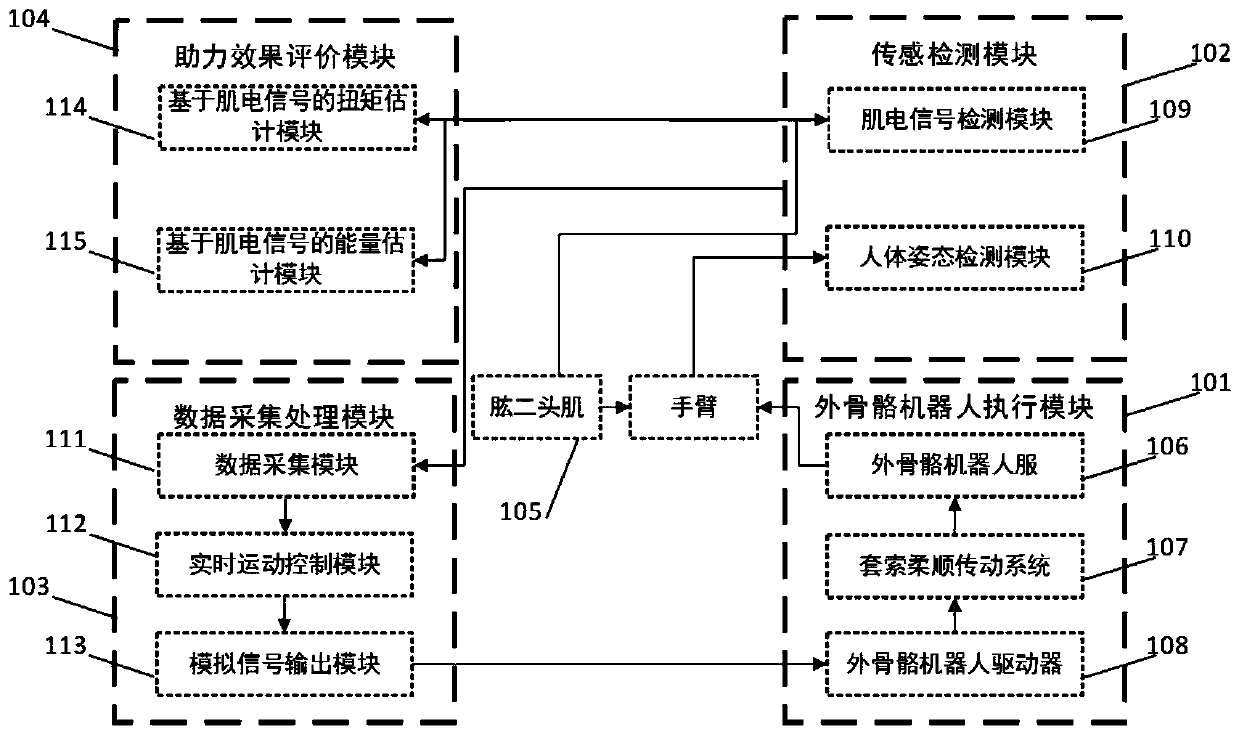
[0063] As described in the present invention figure 1 As shown, a neural network-based power assist control system for an exoskeleton robot according to the present invention includes a sensor detection module 102 , a data collection and processing module 103 and a power assist effect evaluation module 104 . The sensing detection module includes a myoelectric signal detection module 109 and a human posture detection module 110 . The data acquisition and processing module includes a high-precision data acquisition module 111 , a real-time motion control module 112 , and an analog signal output module 113 . The assisting effect evaluation module includes a myoelectric signal torque estimation module 114 and a myoelectric signal energy estimation module 115 .
[0064] The sensing detection module 102 includes a myoelectric signal detec...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More