

A position calculation method based on ckf, chan calculation and savitzky-golay smoothing filter
A technology of smooth filtering and calculation, applied in the field of positioning, can solve the problems of decreased distance accuracy and low positioning accuracy, and achieve the effect of improving accuracy, good estimation accuracy, and easy realization
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
[0129] A kind of position calculation method based on CKF, chan solution and Savitzky-Golay smoothing filtering involved in this embodiment, its detailed steps are realized as follows:
[0130] S1, using the TDOA measurement value error model (1),
[0131]
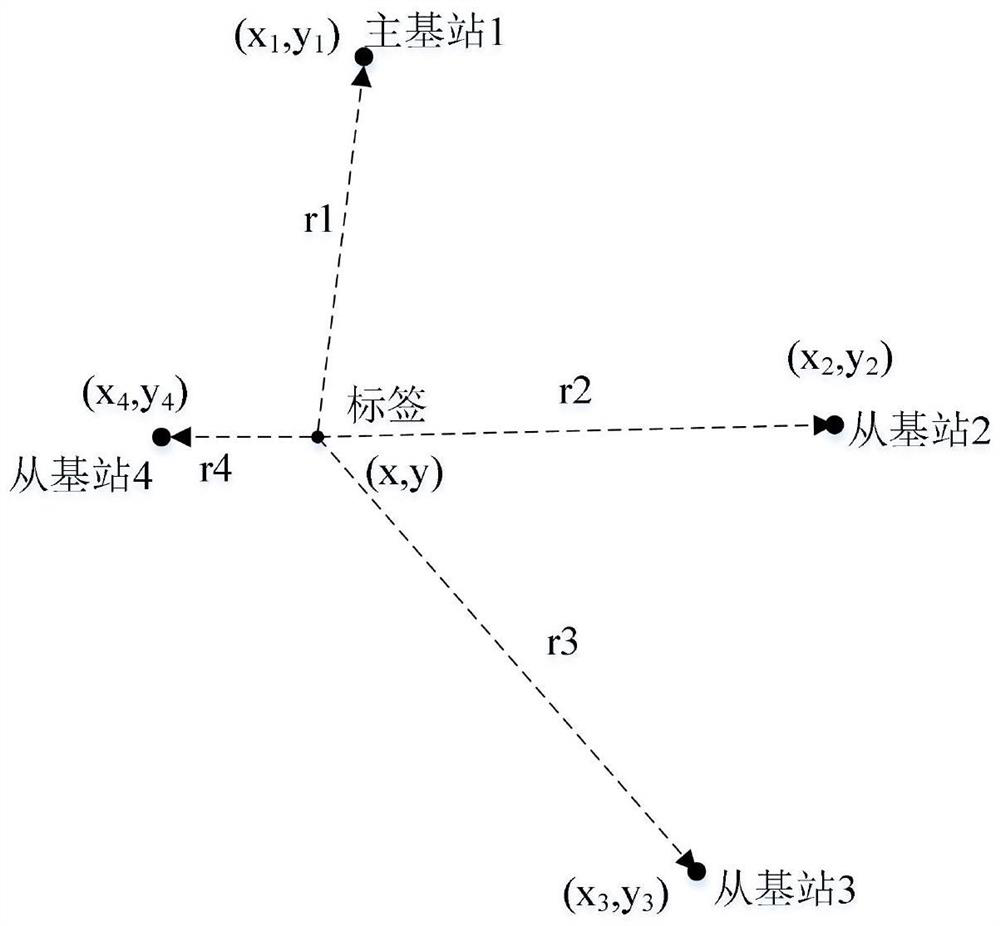
[0132] Among them, r kIndicates the distance between the current tag and the base station, r k-1 Indicates the distance between the tag and the base station at the last moment, T indicates the measurement interval, v is the tag's movement speed, a is the tag's movement acceleration, Δr k The distance difference between the tag and the master base station and the slave base station, Δr k主 , Δr k从 represent the distances from the tag to the main base station and from the base station, respectively, Δt ij is the actual time difference of the signal arriving at the base station, is the ideal arrival time difference, μ is the error of the measurement sensor and the environment, which meets Gaussian white noise;
[0...
Embodiment 2
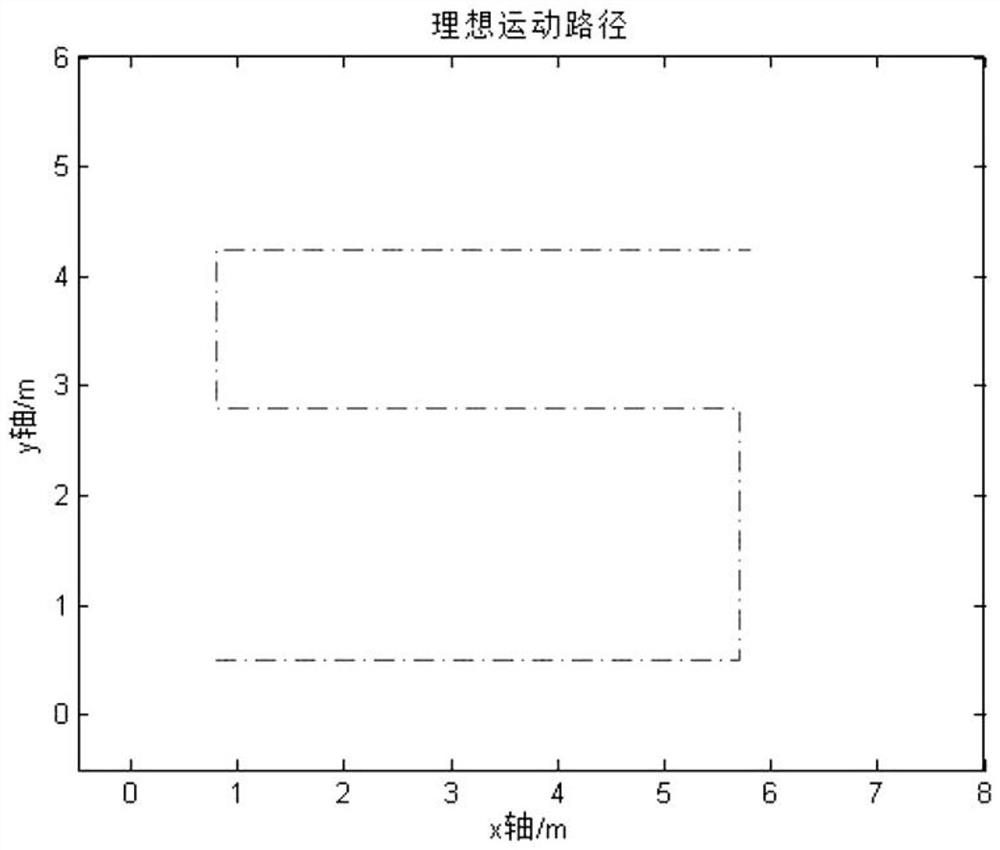
[0242] In order to verify the effectiveness of the above algorithm, taking the UWB application as an example, an experiment was conducted with one positioning per second. The test was carried out in an 8m×8m room. The test only used chan for position calculation and CKF, chan and Savitzky-Golay respectively. The calculation effect of the smoothing filter is affected by the pace, and the positioning times of the two tests are different;
[0243] image 3 For the set ideal trajectory, Figure 4 It is a comparison chart of the position calculation results using only the chan algorithm and the position calculation results using CKF, chan algorithm and Savitzky-Golay smoothing filter, Figure 5 It is a comparison chart of the positioning error of the two methods. According to the calculation, the mean value of the positioning error using only the chan solution method is 0.1278 meters, and the standard deviation is 0.0927. Figure 4 and Figure 5 It can be seen that after adding...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More