

Dynamic object tracking method used for port autonomous-driving vehicle
A dynamic target and automatic driving technology, applied in the field of artificial intelligence, can solve the problems of high cost, large size, and difficulty in obtaining stable targets for lidar, and achieve the effects of reducing instability, wide sensing area, and convenient configuration
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
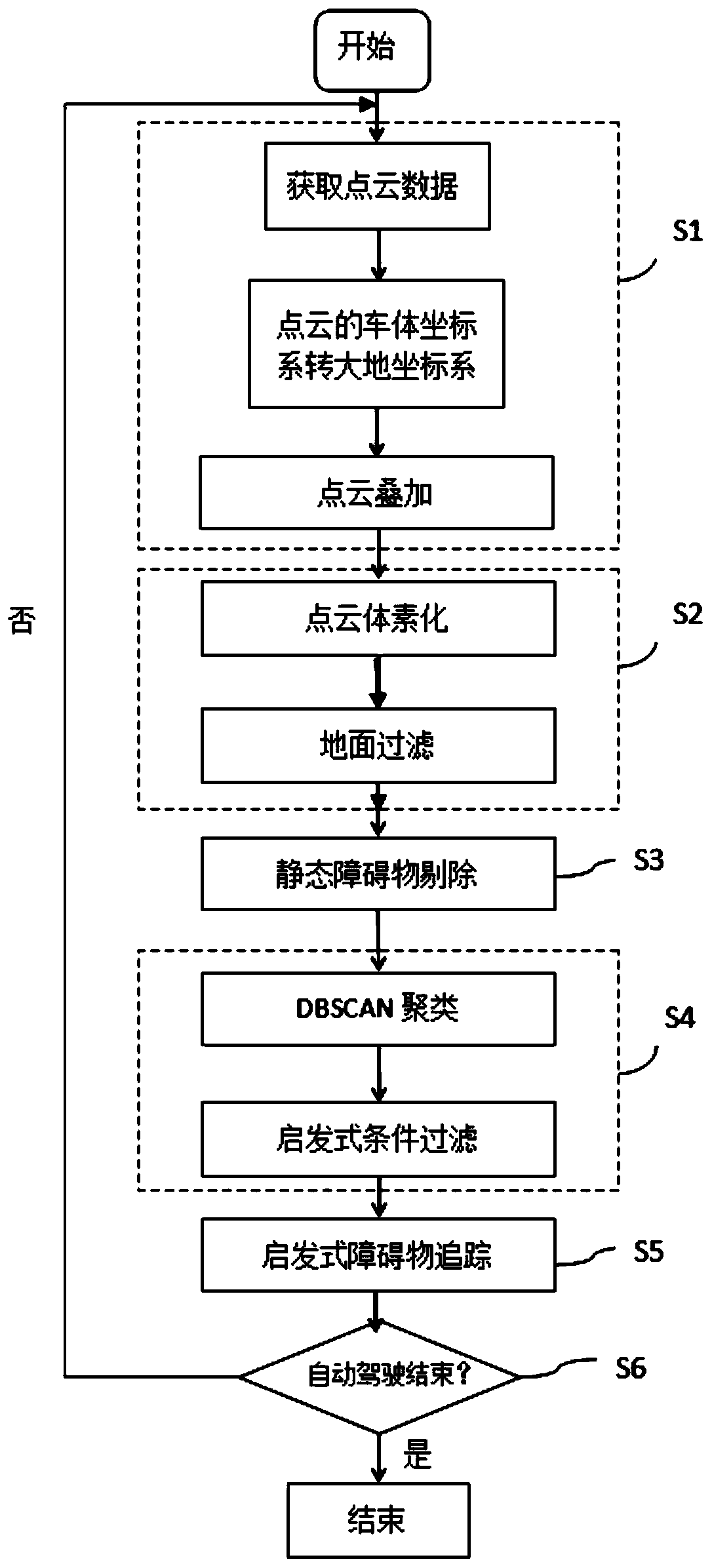
[0048] see figure 1 , the inventive port dynamic target tracking method comprises the following steps:
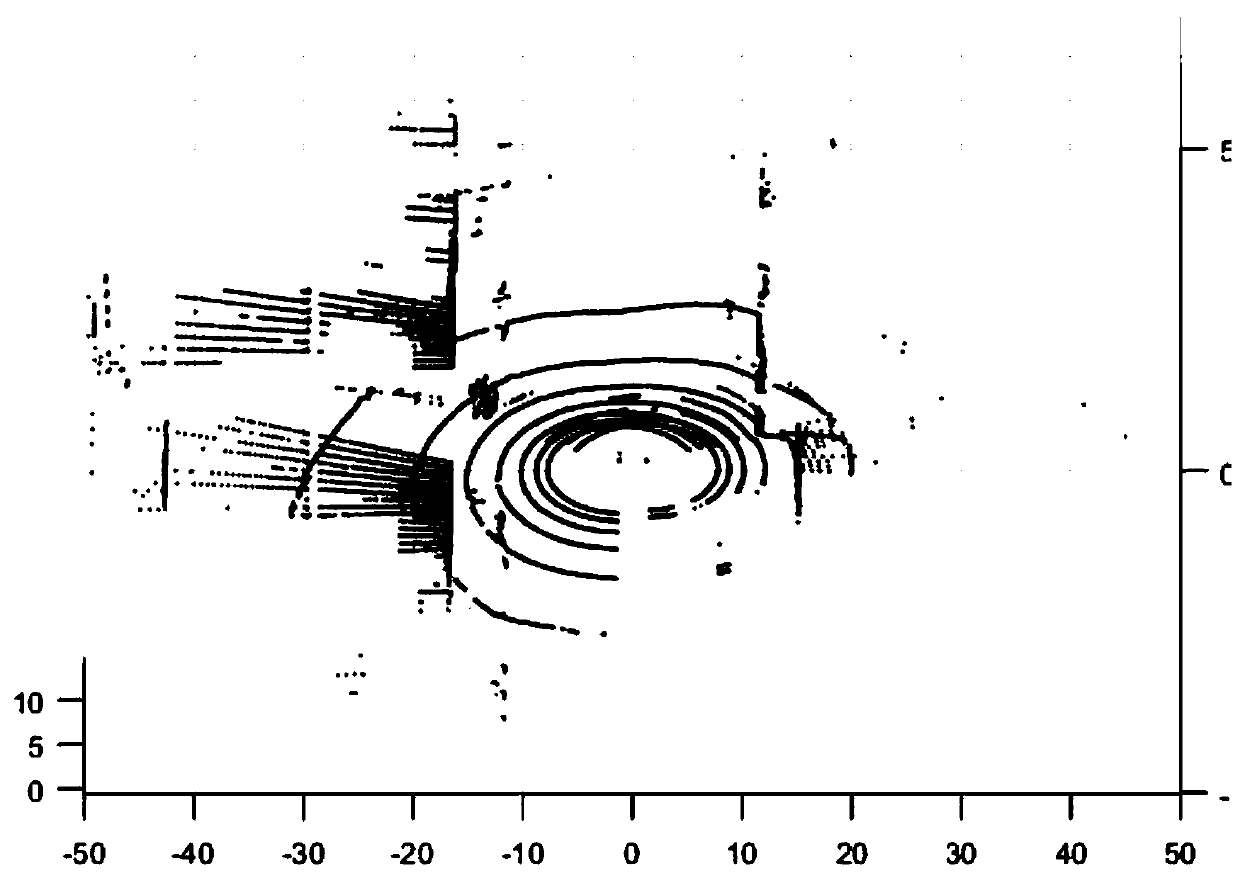
[0049] Step 1. Obtain environmental point cloud data, convert point cloud coordinates and perform point cloud superposition:
[0050] In this embodiment, a 16-line laser radar is installed at a position about 1.7m high on both sides of the front of the vehicle, and the original point cloud data of the surrounding environment are obtained through these two 16-line laser radars. The obtained original point cloud data is as follows: figure 2 shown. The data acquisition frequency of the lidar sensor is set to 10 Hz, and the GPS clock is used as the clock reference. The longitude and latitude coordinates of the vehicle body are obtained through the vehicle inertial navigation system (referred to as inertial navigation system). Since the point cloud data obtained by lidar is in the vehicle body coordinate system, and the latitude and longitude obtained by inertial navigation,...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More