

Unmanned aerial vehicle concealing approach method of employing priority random sampling strategy-based Double DQN
A random sampling and unmanned aerial vehicle technology, which is applied in the direction of instruments, adaptive control, control/regulation systems, etc., can solve problems such as over-fitting phenomena, achieve the effect of solving excessively high dimensions and improving rapidity
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0026] The technical solution of the present invention is described in detail in combination with the accompanying drawings.
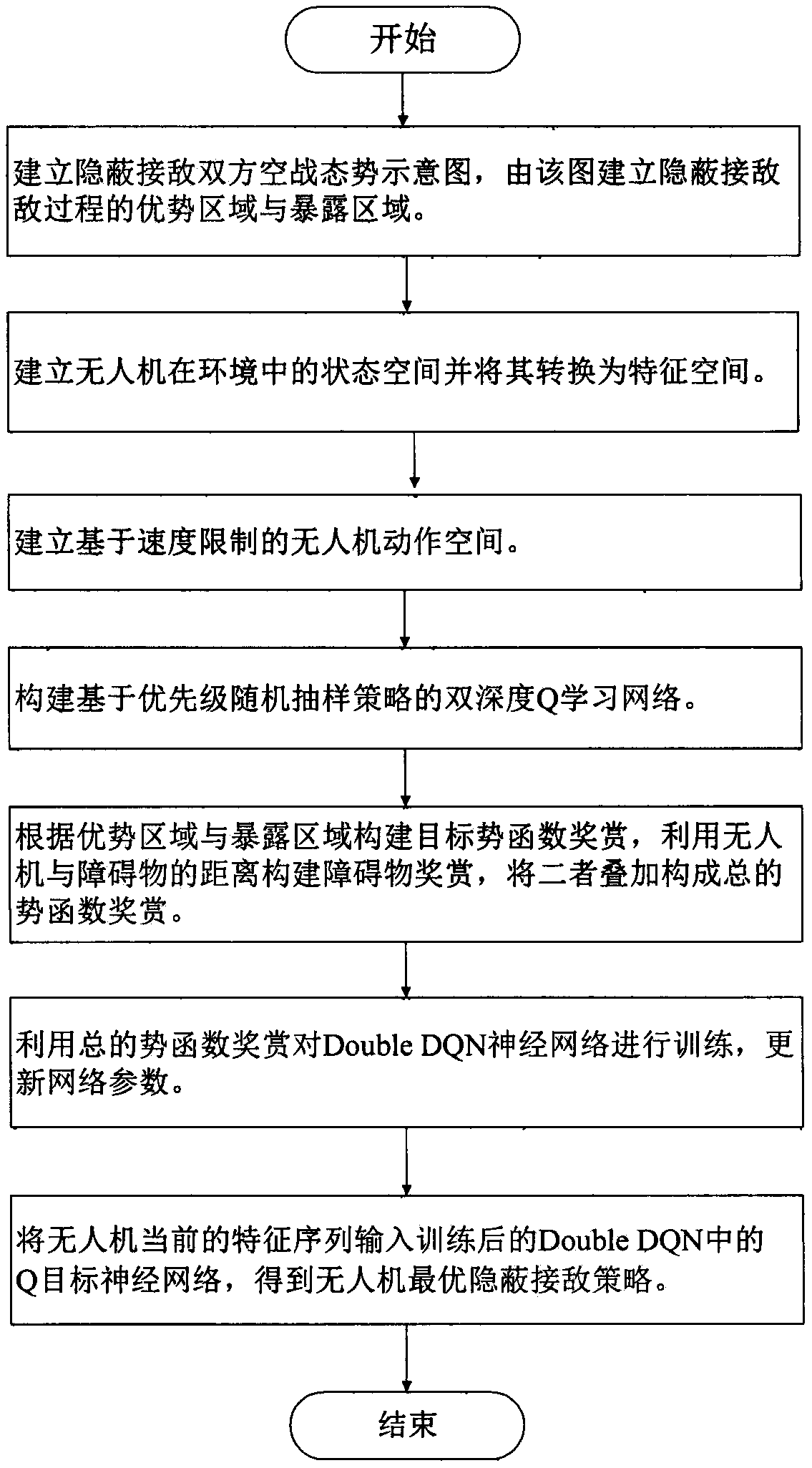
[0027] A kind of Double DQN unmanned aerial vehicle concealed contact method based on priority random sampling strategy of the present invention, specifically comprises the following steps:
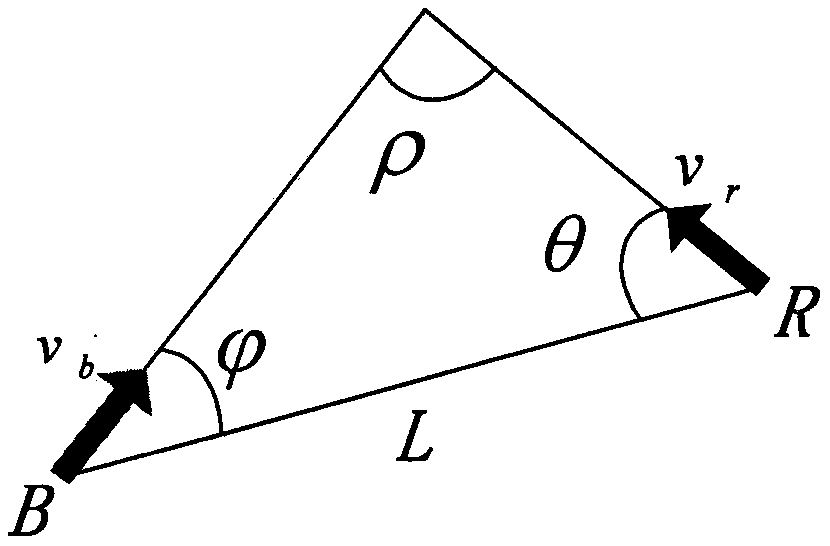
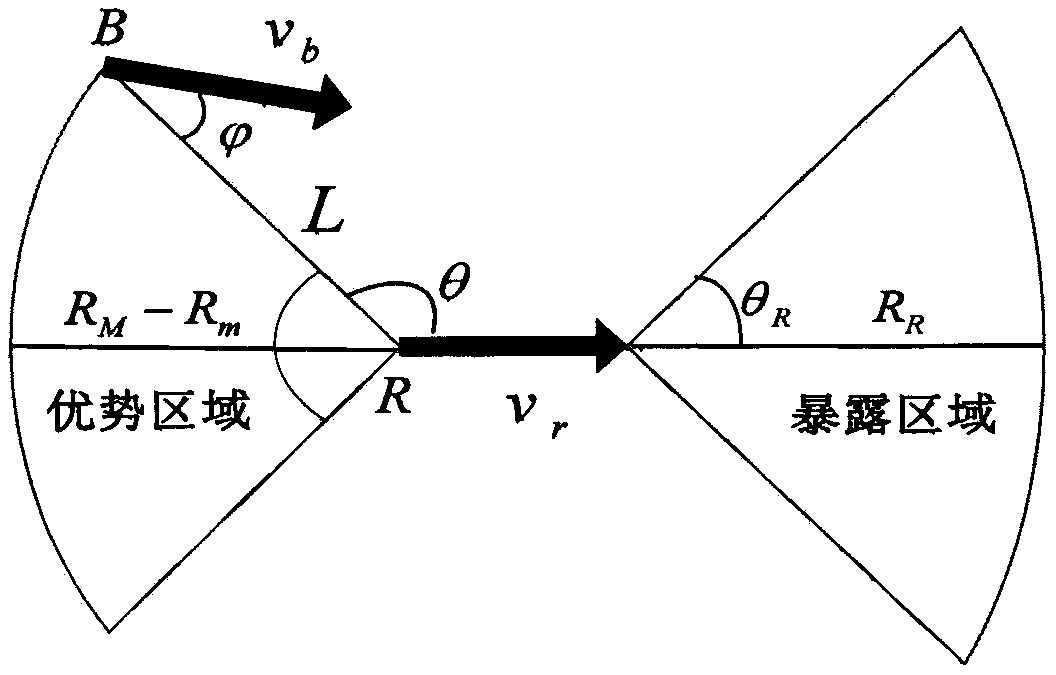
[0028] Step 1, establish a schematic diagram of the air combat situation of both sides in concealed contact with the enemy, as shown in figure 2 shown. In the figure, B and R are the positions of our and enemy drones respectively, and L is the distance between the enemy and us. is the advance angle of our UAV, θ is the entry angle of the enemy UAV, ρ is the angle between the course of the enemy and us, v b and v r are the velocity vectors of the enemy and the enemy, respectively. Then, according to the air combat situation map, the dominant area and exposed area in the process of concealed contact with the enemy are obtained, as shown in Figure 3, and the sp...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More