

Random system filter containing unknown input and non-Gaussian measurement noise
A technology for measuring noise and unknown input, applied in impedance networks, digital technology networks, electrical components, etc., can solve problems such as limitations, and achieve the effects of enhanced adaptability, high-precision state estimation, and improved robustness
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
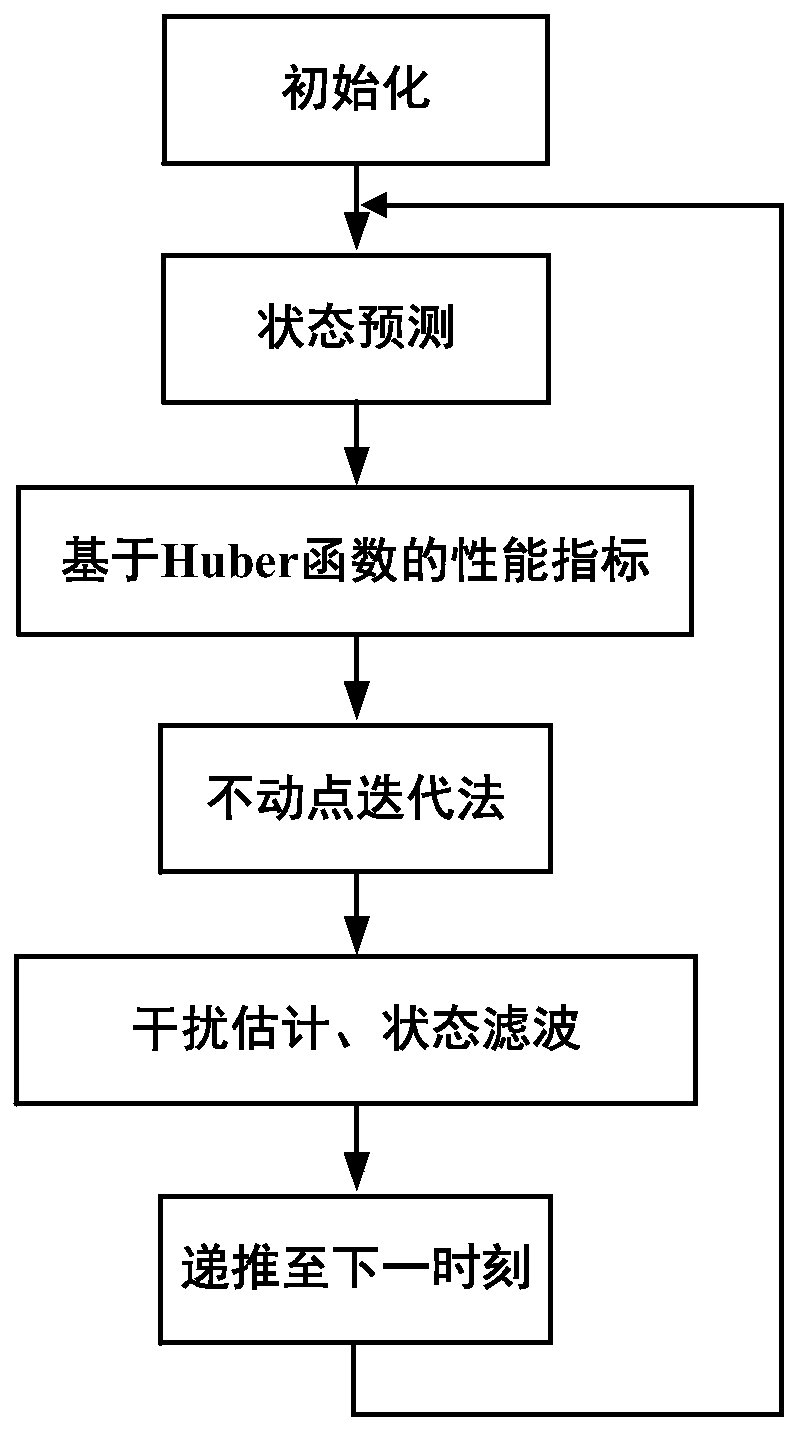
[0041] like figure 1 Shown, the specific implementation steps of the present invention are as follows (the specific realization of method is illustrated with a certain moving body of approximately uniform acceleration rectilinear motion as an example):
[0042] 1. State prediction
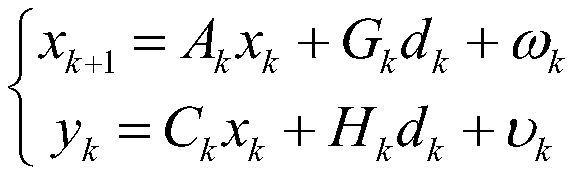
[0043] (1) When the moving body is moving in a straight line with approximately uniform acceleration, the kinematic equation is as follows:
[0044]
[0045] The measurement equation is:
[0046] the y k =s k +d k +υ k
[0047] where s k , v k and a k respectively represent the position, velocity and acceleration of the moving body at time k, and the measurement information y k Provided by the position sensor, T is the sampling period, d k Indicates unknown input / disturbance, (i=1,2,3) are independent Gaussian white noise, υ k Denotes zero mean variance for R k The noise of , which has the characteristics of Student's t distribution, Laplace distribution or other distributions wit...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More