

A compliant manipulator and its grasping operation method
A manipulator and compliant technology, applied in the field of robotics, can solve the problems of control system deviation, affecting the compliant control of fruit picking, increasing system complexity and control difficulty, and achieving the effect of simplifying system structure and compliant positioning
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0059] In order to make the object, technical solution and advantages of the present invention clearer, the present invention will be described in further detail below in conjunction with specific embodiments and with reference to the accompanying drawings.
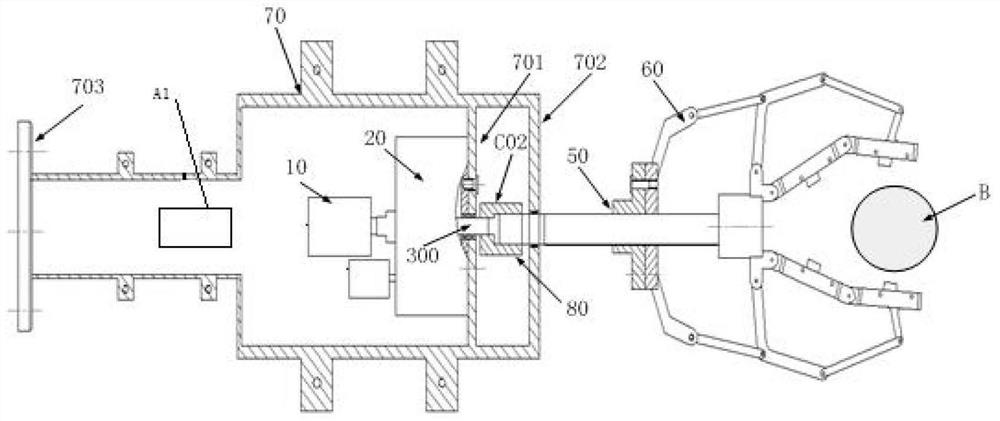
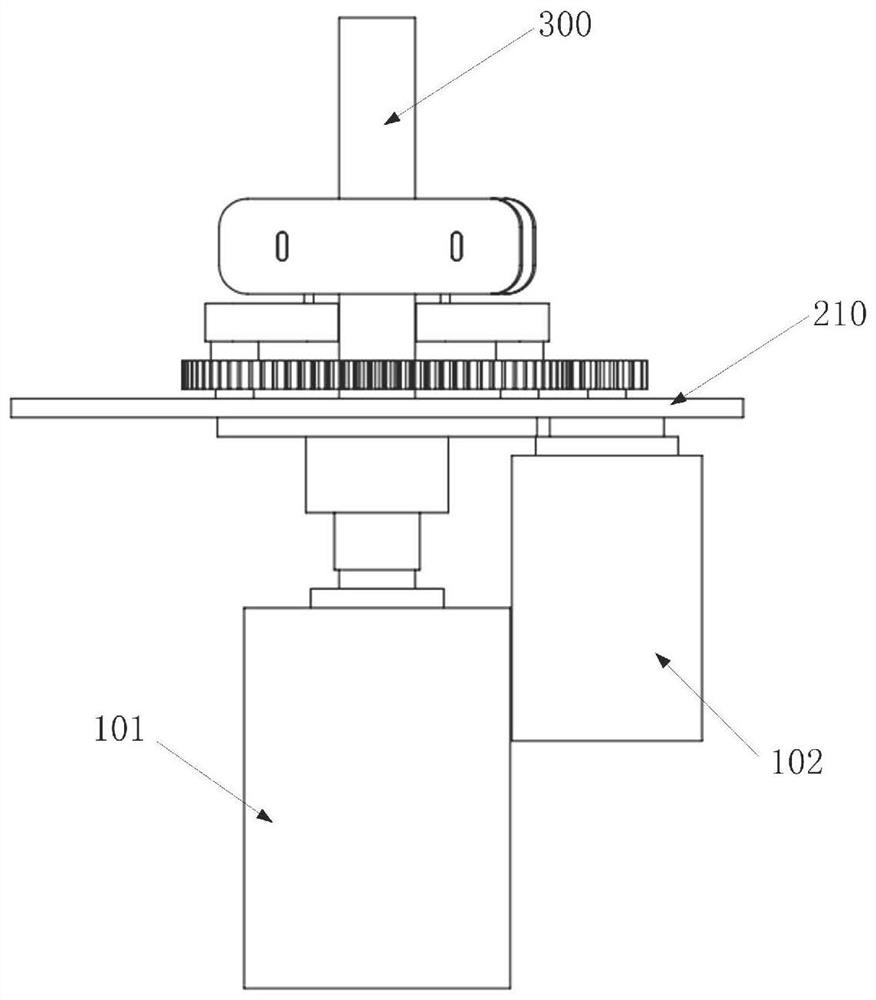
[0060] As one of the specific implementations of the present invention, as shown in the figure, a compliant manipulator includes a housing 70, a motion control module A1 is installed inside the housing 70, and the motion control module A1 is electrically connected to a drive unit 10, the drive unit 10 is power-connected with a transmission module 20, the transmission module 20 includes a bottom plate 210, a transmission shaft 300 is installed through the bottom plate 210, and one end of the transmission shaft 300 is power-connected with the drive unit 10 , the transmission shaft 300 is equipped with a torque adjustment bull gear 421 through the bearing C01, the torque adjustment bull gear 421 is meshed with a torque adjust...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More