

Adaptive event trigger control method for nonlinear uncertain system
An event-triggered and control method technology, applied in the direction of adaptive control, general control system, control/regulation system, etc., can solve the problems of sudden increase in system transmission pressure, large impact on system performance, loss of system control force, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
[0126] The present invention will be further described in detail below in conjunction with the embodiments and the accompanying drawings, but the embodiments of the present invention are not limited thereto.
[0127] Such as figure 1 As shown, an adaptive event-triggered control method for nonlinear uncertain systems includes the following steps:
[0128] (1) System model;
[0129] Define an uncertain nonlinear system with input saturation as follows:
[0130]
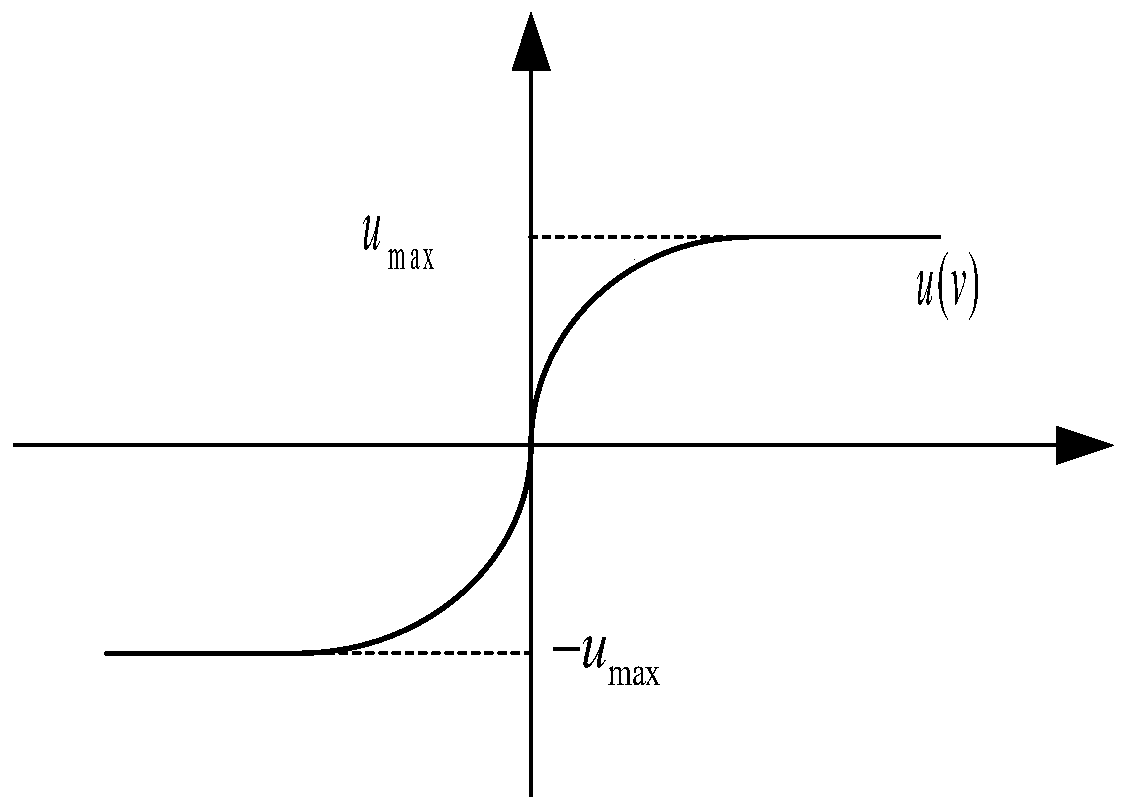
[0131] Among them, y∈R is the output of the system, x=[x 1 ,...,x n ] T ∈ R n and is the system state, f i (i=1,2,...,n) represents the unknown smooth nonlinear function of the system, v(t) represents the actual control input; u(v) represents the control input with saturation characteristics, which can be described as:
[0132] u(v)=sat(v)=sgn(v)min(|v|,u max ) (2)
[0133] Among them, u max >0 is the threshold of system input saturation characteristic, |u(v)|≤u max ; Obviously, when |u(v)|=u max , the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More