

High-precision positioning method of mobile robot along subway track
A mobile robot, positioning method technology, applied in the directions of instruments, navigation, mapping and navigation, can solve problems such as poor positioning accuracy and reliability, positioning accuracy problems, and achieve the effect of solving poor positioning accuracy and reliability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0068] In order to make the object, technical solution and advantages of the present invention more clear, the present invention will be described in detail below in conjunction with the accompanying drawings and specific embodiments.
[0069] A high-precision positioning method for moving a robot along a subway track, specifically comprising the following steps:
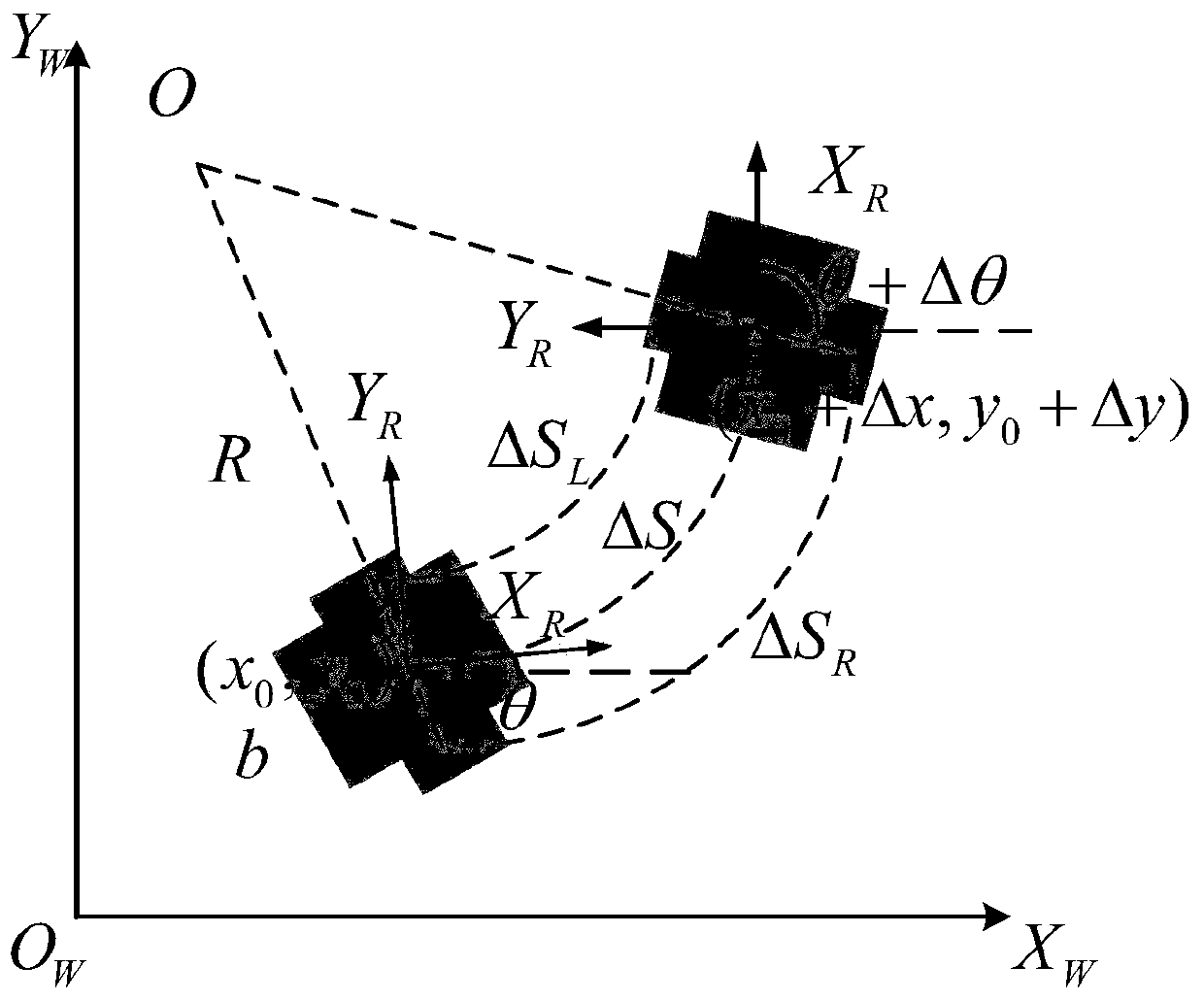
[0070] Step S1: Set the initial pose P of the mobile robot 0 =(x 0 ,y 0 , θ 0 ), reaching the pose point P after ΔT time 1 =(x 0 +Δx,y 0 +Δy,θ 0 +Δθ). where (x 0 ,y 0 ) is the initial pose of the mobile robot, θ 0 is the initial azimuth, that is, the coordinate system X of the mobile robot R The positive direction of the axis and the global coordinate system X W The included angle in the positive direction of the axis, b is the wheel base of the left and right wheels, R is the radius of the moving arc of the mobile robot, ΔS R , ΔS L , ΔS respectively represent the moving distance of the left and right...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More