

A Construction Method of Spatial Jacobian Matrix for Robot Parameter Identification
A Jacobian matrix and parameter identification technology, applied in the field of robot calibration, can solve the problems of long time consumption of parameter identification algorithm and difficulty in adapting to the needs of robot technology.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0060] In order to make the object, technical solution and advantages of the present invention clearer, the present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments. It should be understood that the specific embodiments described here are only used to explain the present invention, not to limit the present invention. In addition, the technical features involved in the various embodiments of the present invention described below can be combined with each other as long as they do not constitute a conflict with each other.
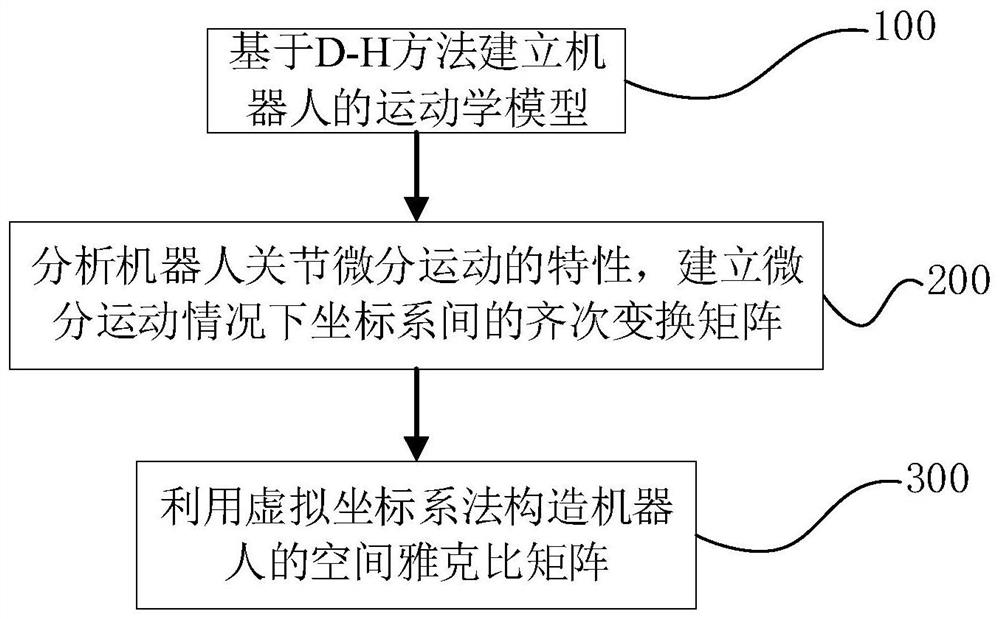
[0061] Such as figure 1 As shown, the embodiment of the present invention provides a method for constructing a spatial Jacobian matrix for robot parameter identification, including the following steps:
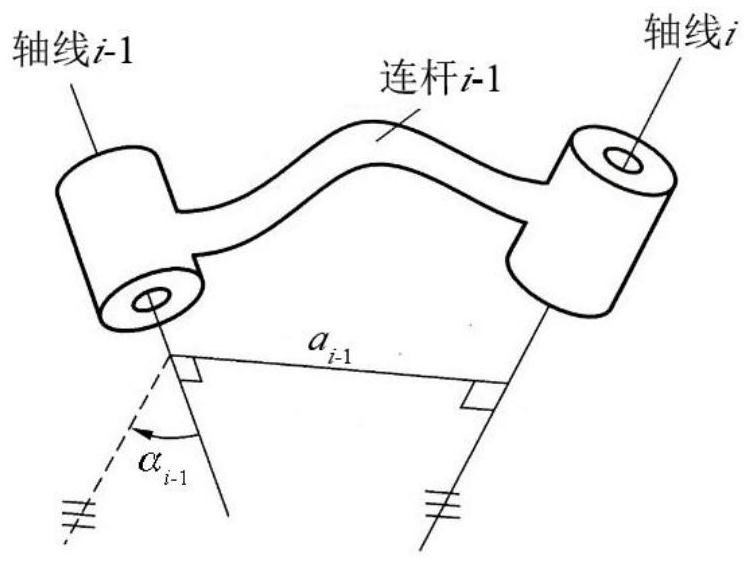
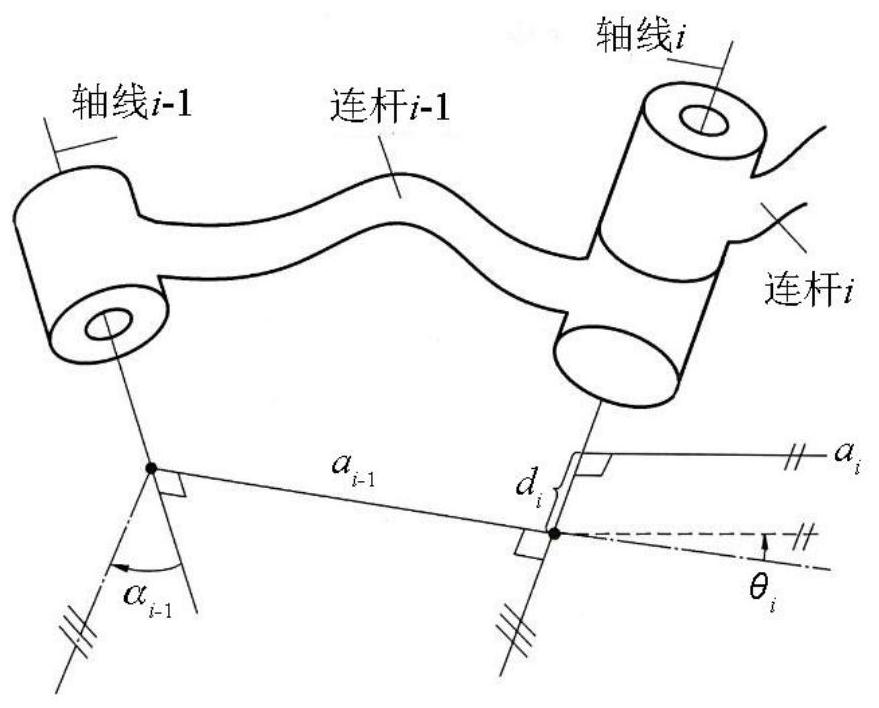
[0062] S100: Establish a kinematics model of the robot based on the D-H method. Analyze the influence of rod length a, torsion angle α, offset distance d, and joint angle θ on the relationship...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More