

Pedicle screw operation path automatic planning method based on deep learning network
A deep learning network and surgical path technology, applied in the field of spinal surgery path planning based on deep learning, can solve problems such as difficulty in meeting the accuracy requirements of spinal robotic surgery
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0019] The present invention will be further described below in conjunction with specific embodiments and accompanying drawings.
[0020] This example uses a 3D CT image data set obtained from a professional medical institution. This data set contains 21 sets of spinal CT images, each of which contains five vertebral blocks (L1-L5) of the lumbar spine. The image format is nii format, each image contains three dimensions, which respectively represent three directions in the human body.
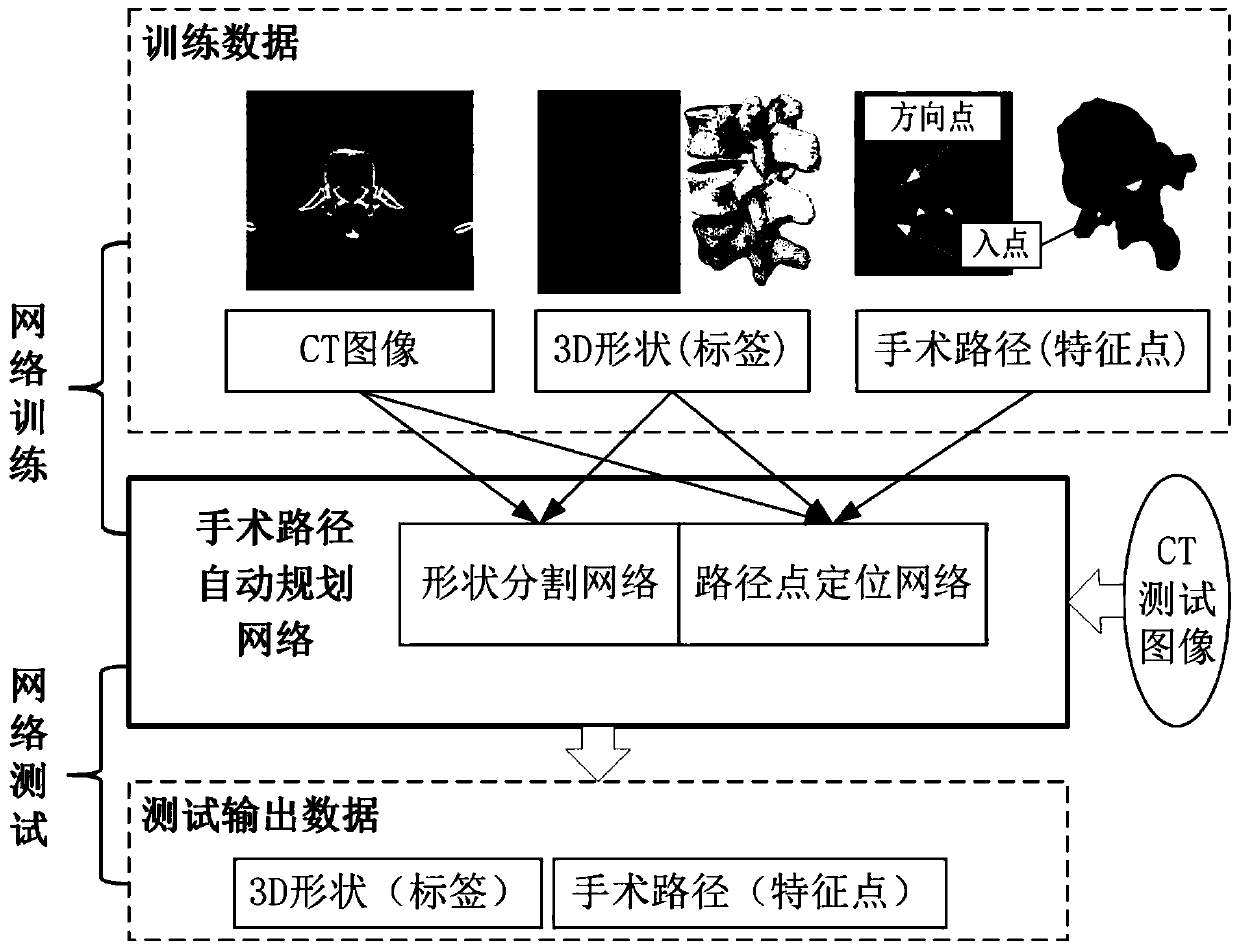
[0021] An automatic surgical path planning method based on deep learning includes the following five steps:
[0022] 1. According to the characteristics of spinal pedicle screw surgery, the surgical path is abstractly expressed as a straight line, and the linear surgical path is discretely expressed as the surgical entry point and the surgical direction point according to its geometric characteristics.
[0023] 2. Use Amira or other medical image processing software to mark the spine CT image....
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More