

Swing-pacing type robot and control system thereof
A control system and robot technology, applied in the direction of program control manipulators, manipulators, manufacturing tools, etc., can solve the problems of high market price, excess load capacity performance, and difficult maintenance, etc., to reduce the difficulty and complexity of manipulation, movement and dynamics The effect of suitable characteristics and light moving components
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0026] The present invention will be described in detail below in conjunction with the accompanying drawings and specific embodiments.
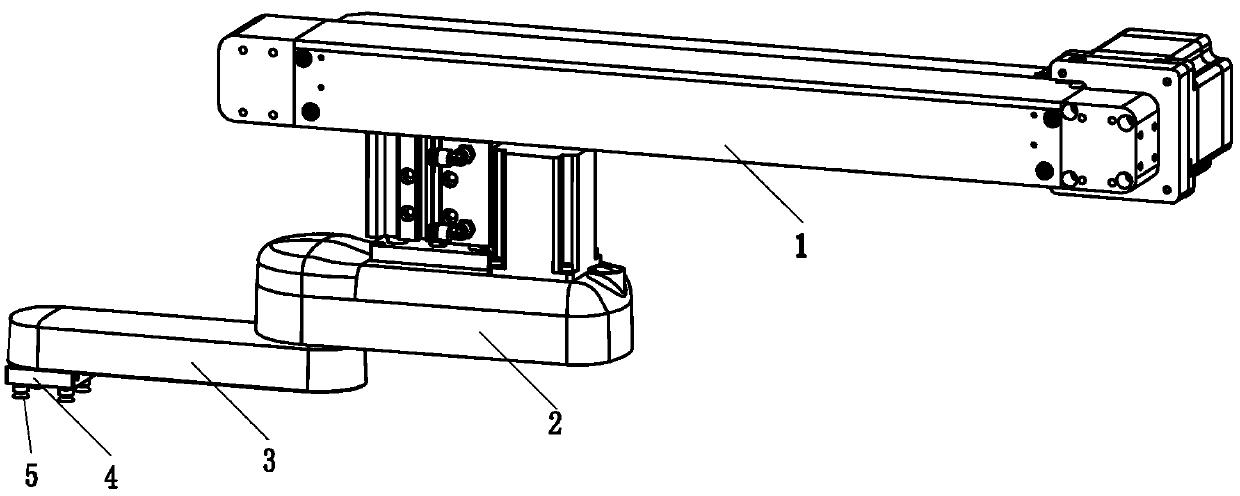
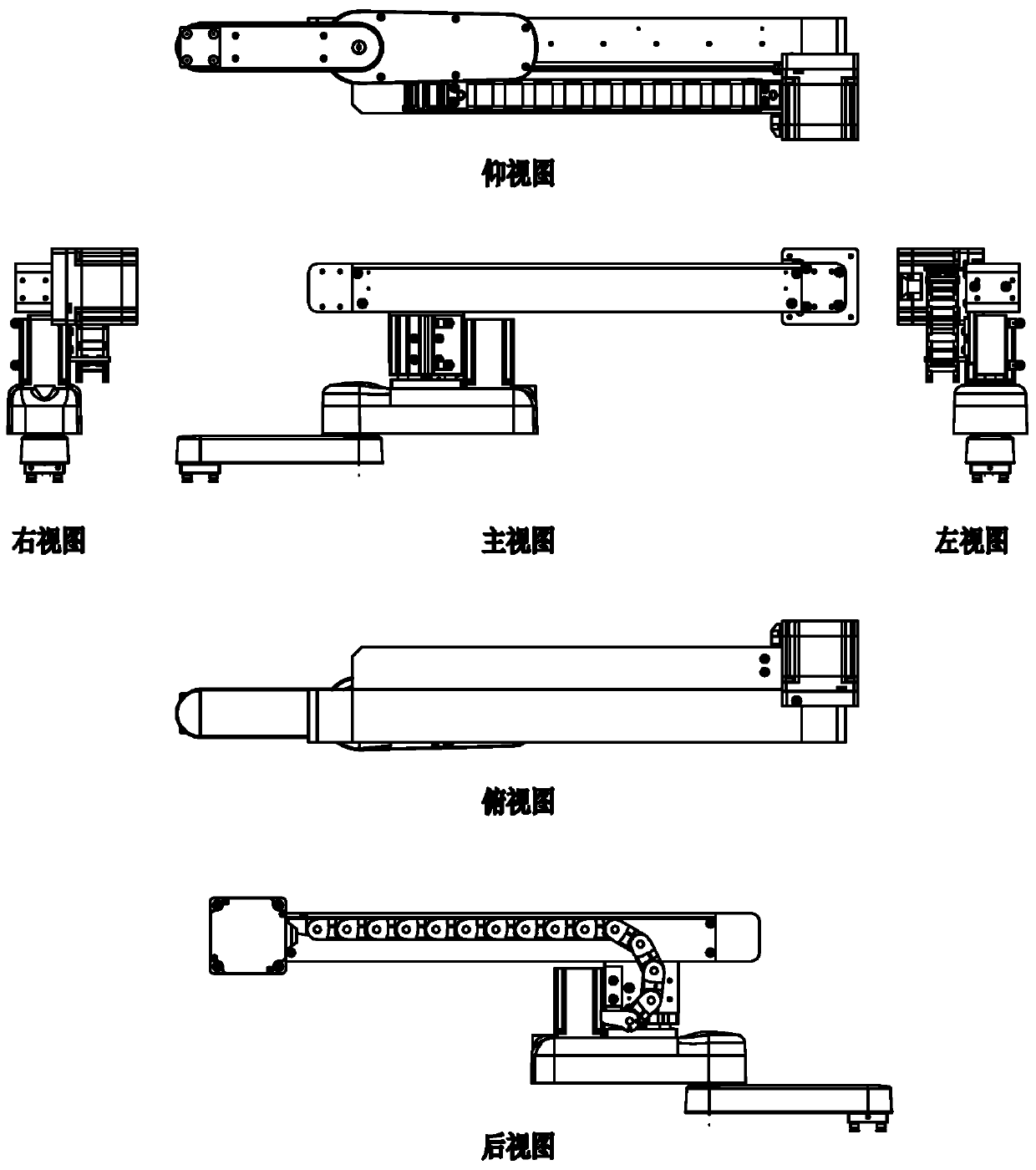
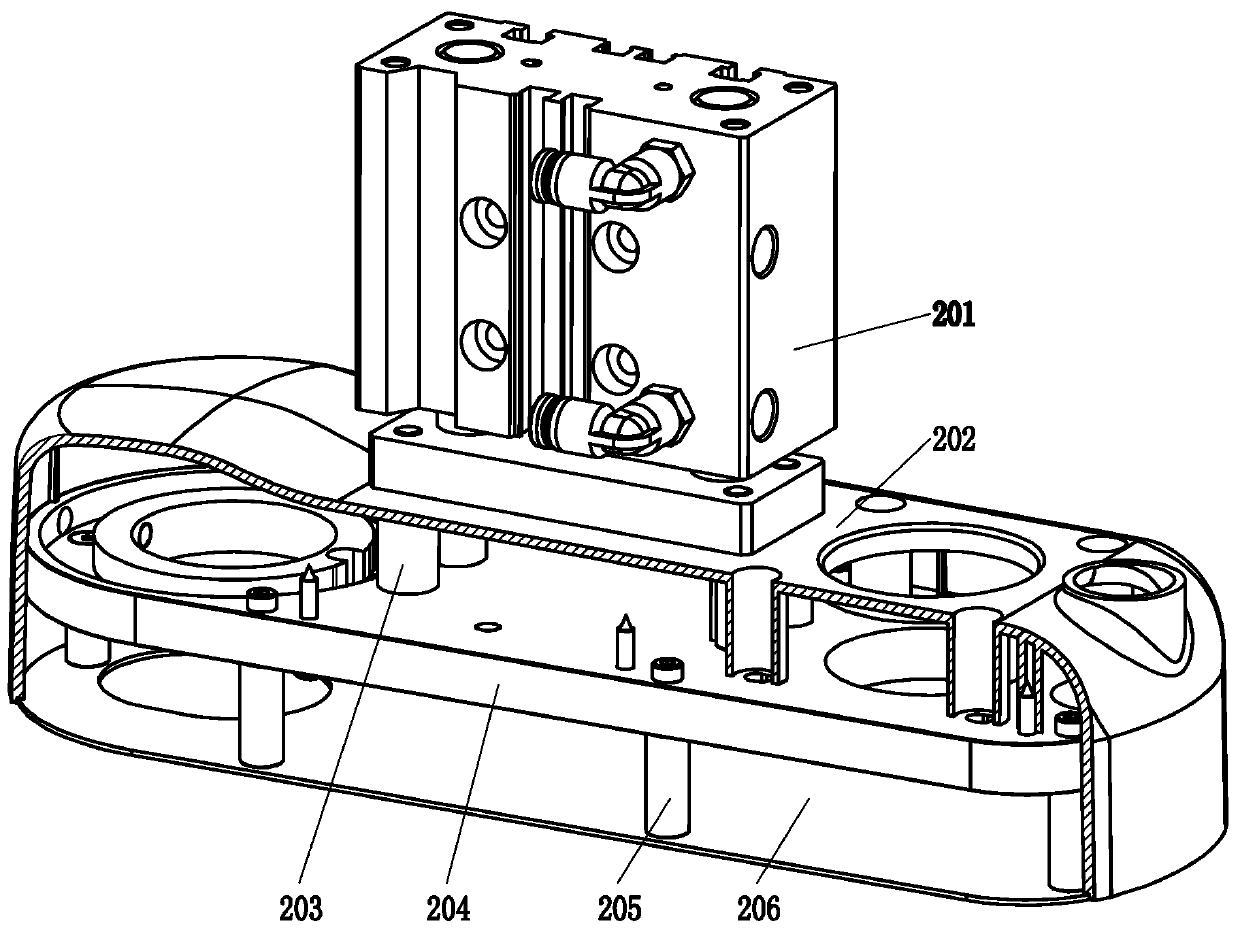
[0027] refer to Figure 1 to Figure 3 As shown, the present invention provides a swing-type robot and its control system, which are applied to the field of work automation plane operations, and are especially suitable for applications such as thermal pressing, indentation, hot stamping, punching, grinding, laser engraving, storage, up and down, etc. Lines, etc. include but are not limited to the above-mentioned production situations of supplying and receiving materials with mold positioning or secondary positioning or free positioning. The present invention includes X-axis 1 for linear motion, Z-axis 2 for lifting motion, U-axis 3 for free rotation, W-axis 4 for 90-degree rotation and hidden slip ring air circuit 5, and is equipped with a set of user-oriented electrical control system.
[0028] X-axis 1 of the linear motion, refer to Figu...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More