

Novel bionic creeping type piezoelectric precision driving device based on parasitic inertia principle
A driving device, piezoelectric drive technology, applied in the direction of piezoelectric effect/electrostrictive or magnetostrictive motors, generators/motors, electrical components, etc., can solve the problem that the large stiffness of piezoelectric components is not fully utilized , reduce output performance, reduce output load and other issues, to achieve the effect of eliminating backlash, improving output performance, and compact layout
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0019] The detailed content of the present invention and its specific implementation will be further described below in conjunction with the accompanying drawings.
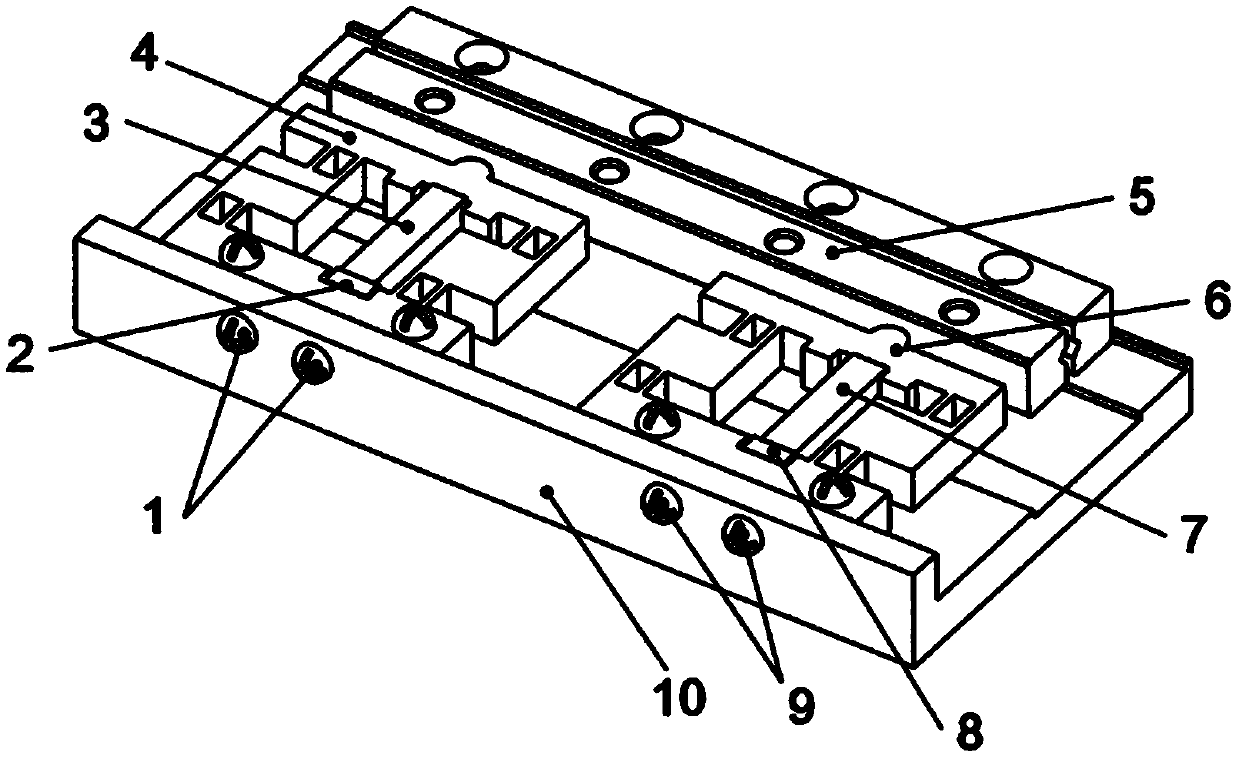
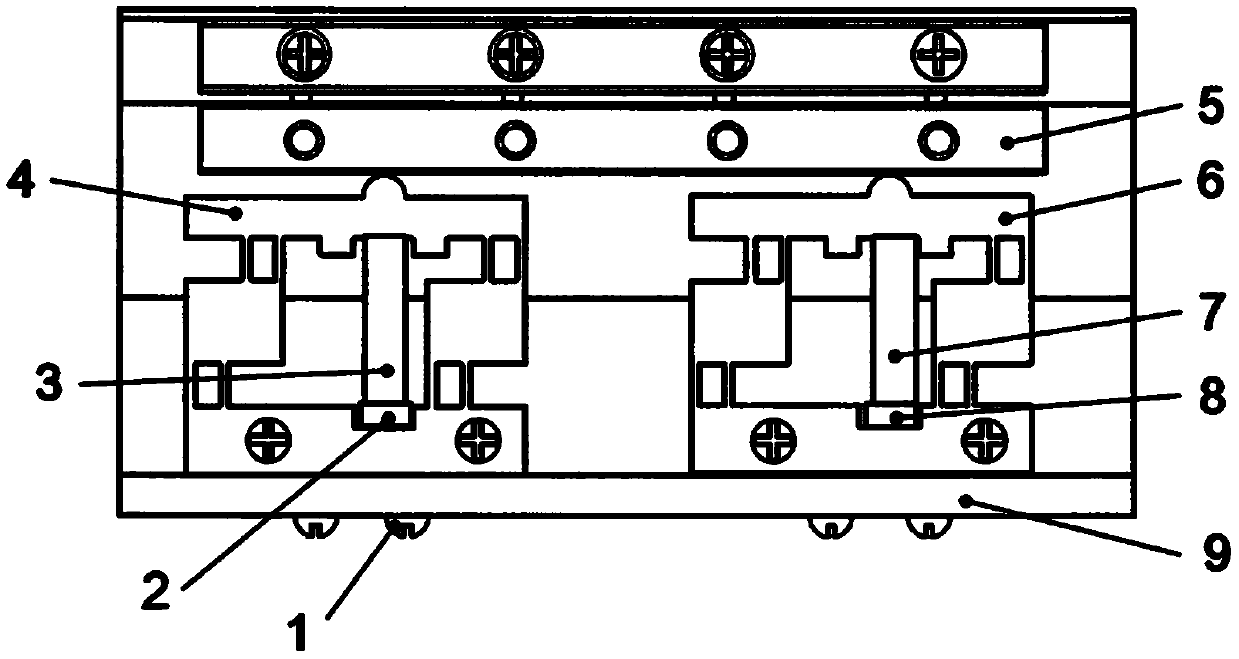
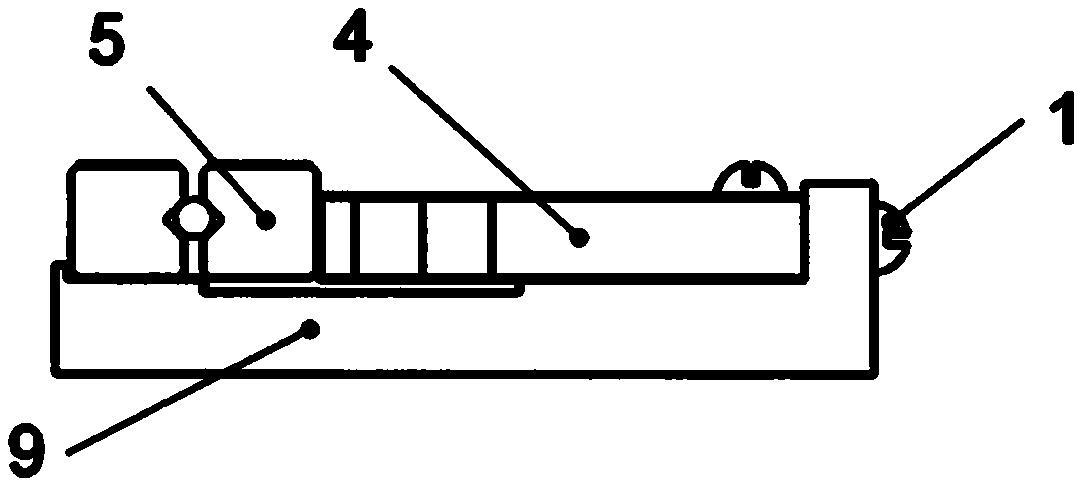
[0020] see Figure 1 to Figure 4 As shown, a new creeping piezoelectric precision drive device based on the principle of parasitic inertia mainly includes a mover (5), piezoelectric stacks I, II (3, 7), pre-tightening wedges I, II (2, 8), pre-tightening screws I, II (1, 9), asymmetric thin-walled flexible hinge mechanisms I, II (4, 6) and base (10), the precision drive device realizes piezoelectric straight line through the principle of parasitic inertia Precision drive. The mover (5) adopts a high-precision linear guide rail with a slider, and the guide rail is fixed on the base (10) by screws; the asymmetric thin-walled flexible hinge mechanisms I, II (4, 6) are installed on the base (10) by screws ); the piezoelectric stacks I, II (3, 7) are respectively installed in the asymmetric thin-walled flexible hinge ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More