

High-sensitivity capacitive flexible three-dimensional force tactile sensor and preparation method thereof
A tactile sensor, high-sensitivity technology, applied in the direction of instruments, other household appliances, force/torque/power measuring instruments, etc., can solve the problem of slow measurement response speed of flexible three-dimensional force tactile sensor, low measurement accuracy of flexible three-dimensional force tactile sensor, The flexible three-dimensional force tactile sensor is easy to wear and tear, and achieves the effect of being suitable for mass production, low price, and improving the dielectric constant
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0032] In order to make the purpose, technical solutions and advantages of the embodiments of the present invention clearer, the technical solutions in the embodiments of the present invention will be clearly and completely described below in conjunction with the drawings in the embodiments of the present invention. Obviously, the described embodiments It is a part of embodiments of the present invention, but not all embodiments. Based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without making creative efforts belong to the protection scope of the present invention.
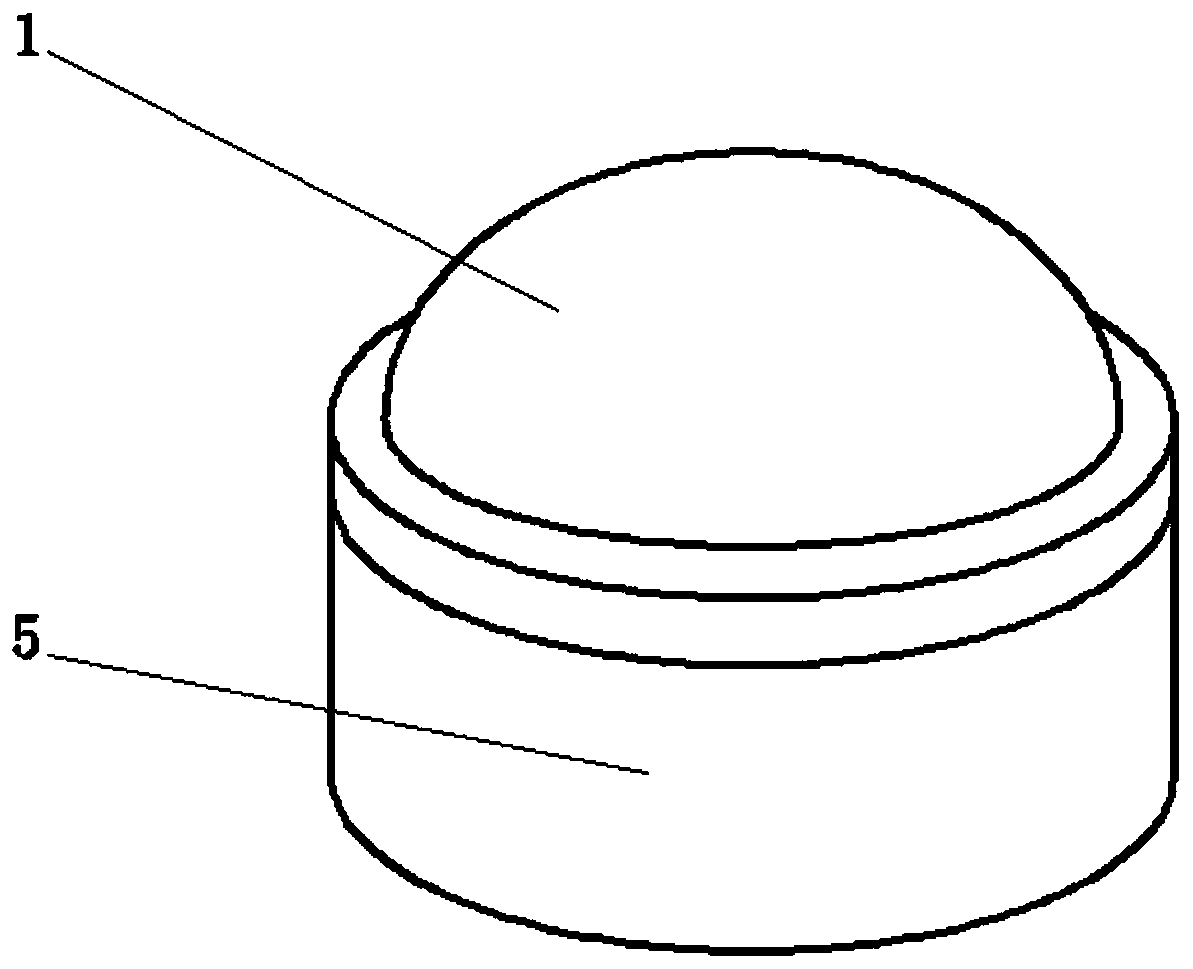
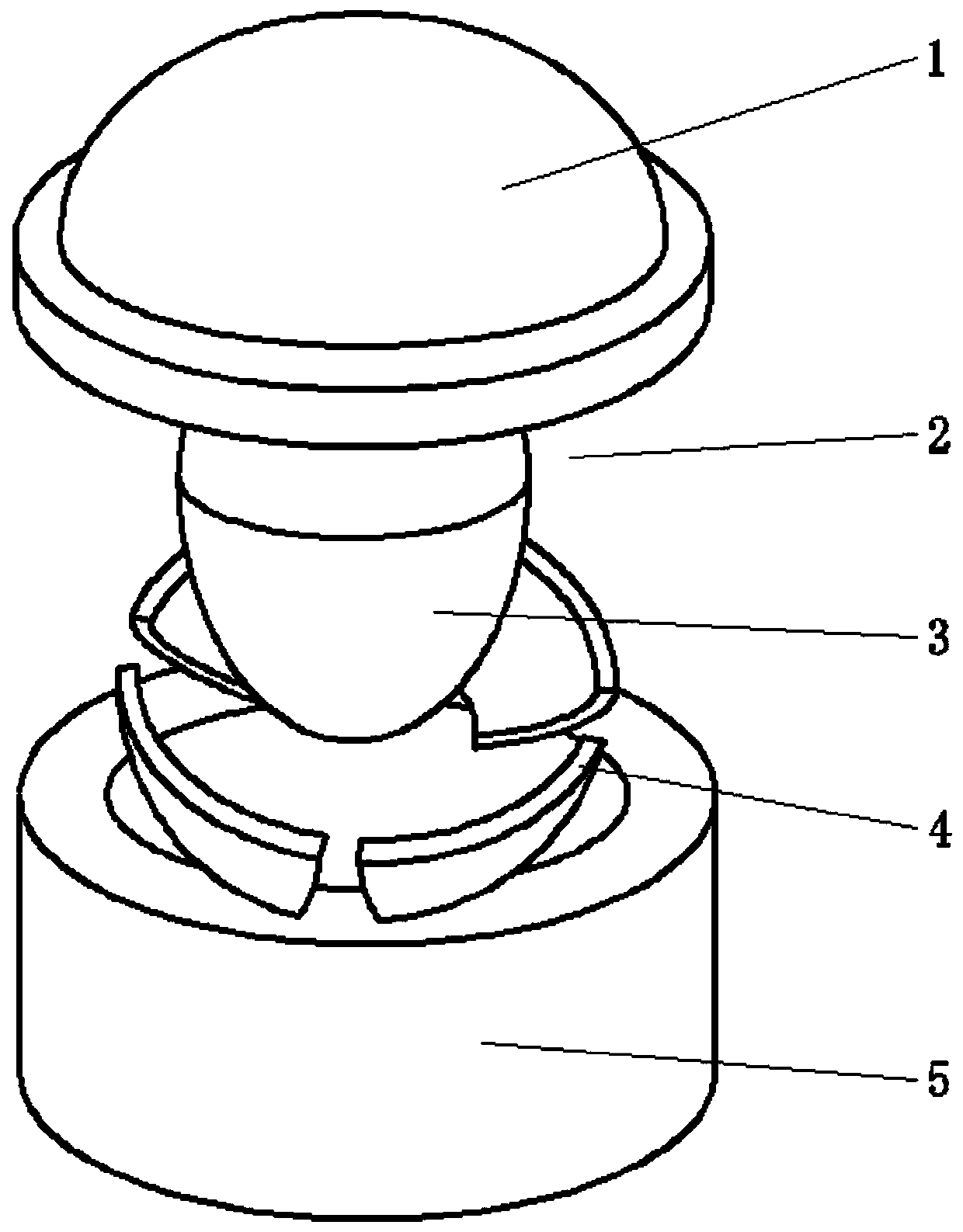
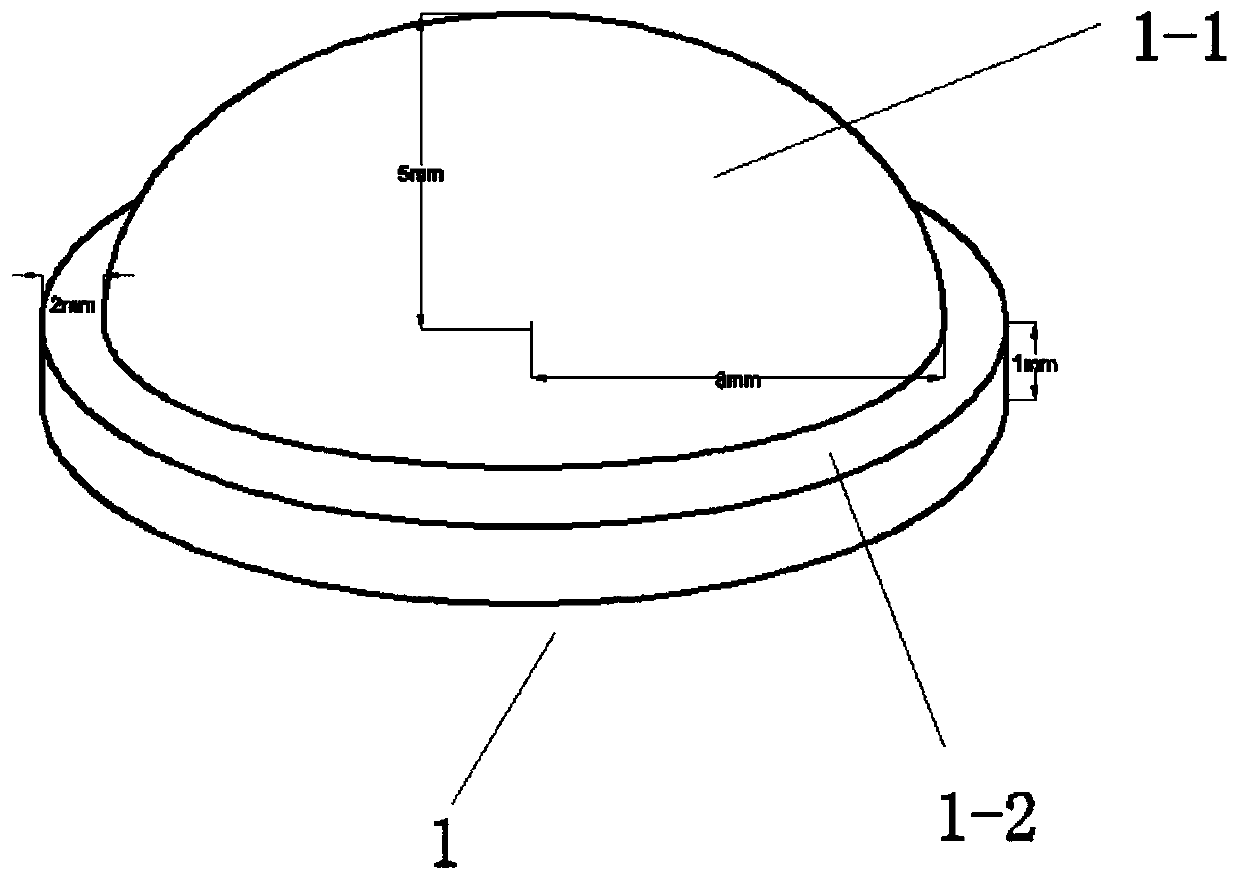
[0033] Figure 1 to Figure 9 shows a schematic structural view of a preferred embodiment of the present invention, as figure 1 and figure 2 As shown, a high-sensitivity capacitive flexible three-dimensional force touch sensor of the present invention is supported by a flexible substrate 5, and a flexible spherical surface excitation electrod...
PUM
| Property | Measurement | Unit |
|---|---|---|
| radius | aaaaa | aaaaa |
| radius | aaaaa | aaaaa |
| thickness | aaaaa | aaaaa |
Abstract
Description
Claims
Application Information
 Login to View More
Login to View More