

Underwater single beacon calibration method capable of estimating unknown effective sound speed
A positioning method and sound speed technology, which are applied in the re-radiation of sound waves, navigation calculation tools, and navigation through speed/acceleration measurement, etc., which can solve the problems of positioning accuracy, time-varying unknown, and influence of single-beacon positioning systems.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
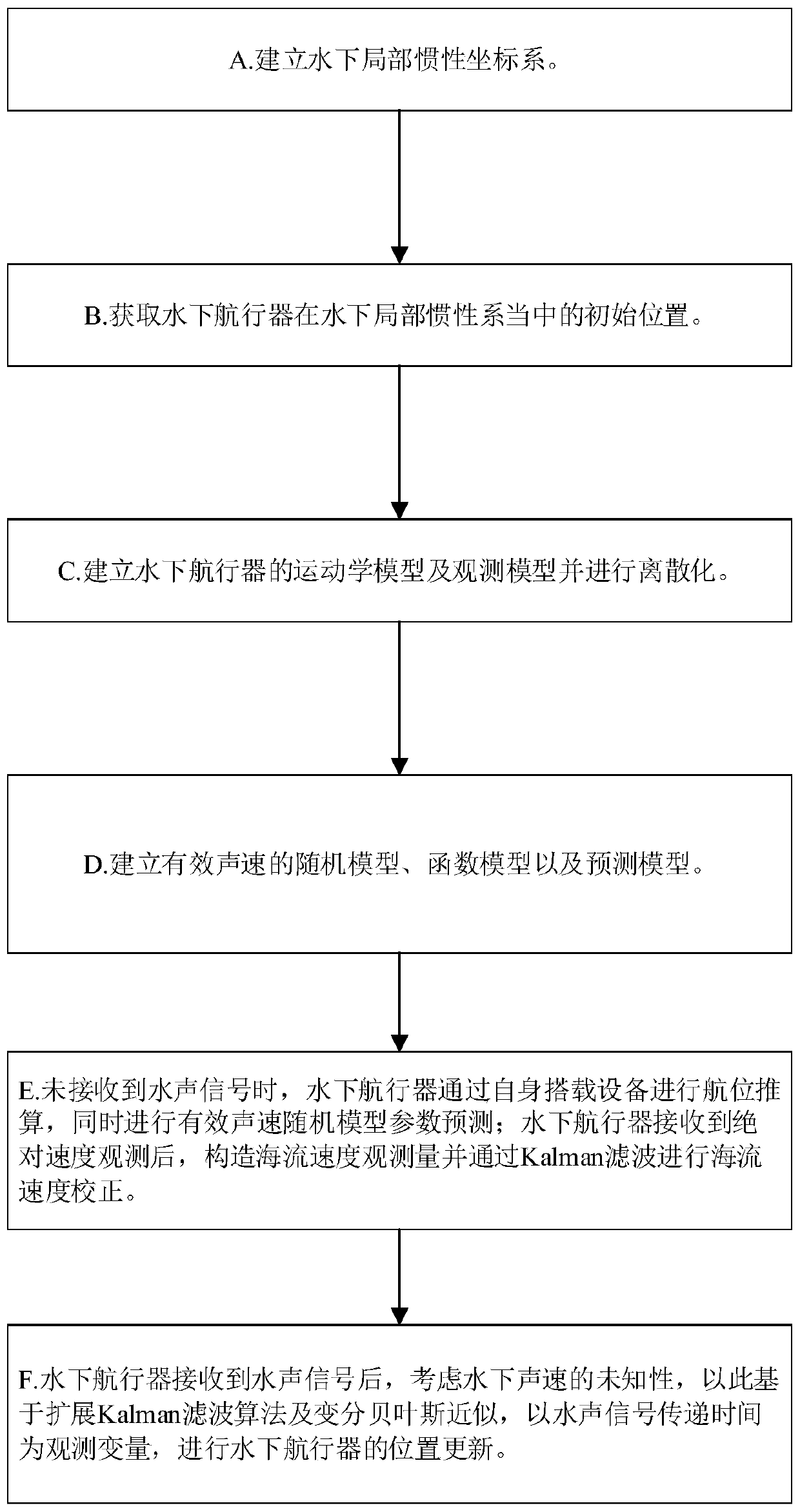
[0165] Embodiment 1, see attached figure 1 , an underwater single-beacon positioning method capable of estimating the unknown effective sound velocity, comprising the following steps:
[0166] A. Take any point in the positioning area as the origin, set the east, north, and sky directions as x, y, and z axes respectively, and establish an underwater local inertial coordinate system;
[0167] B. Obtain the initial position of the underwater vehicle in the underwater local inertial system through the GPS system carried by the underwater vehicle;
[0168] C. Establish the kinematics model and observation model of the underwater vehicle and perform discretization;
[0169] The establishment method of described kinematic model is:
[0170] Define the state vector as:
[0171] x=[x y v cx v cy ] T
[0172] Wherein: x, y are the horizontal positions of the underwater vehicle in the underwater local inertial coordinate system; v cx , v cy is the unknown current velocity;
...
Embodiment 2
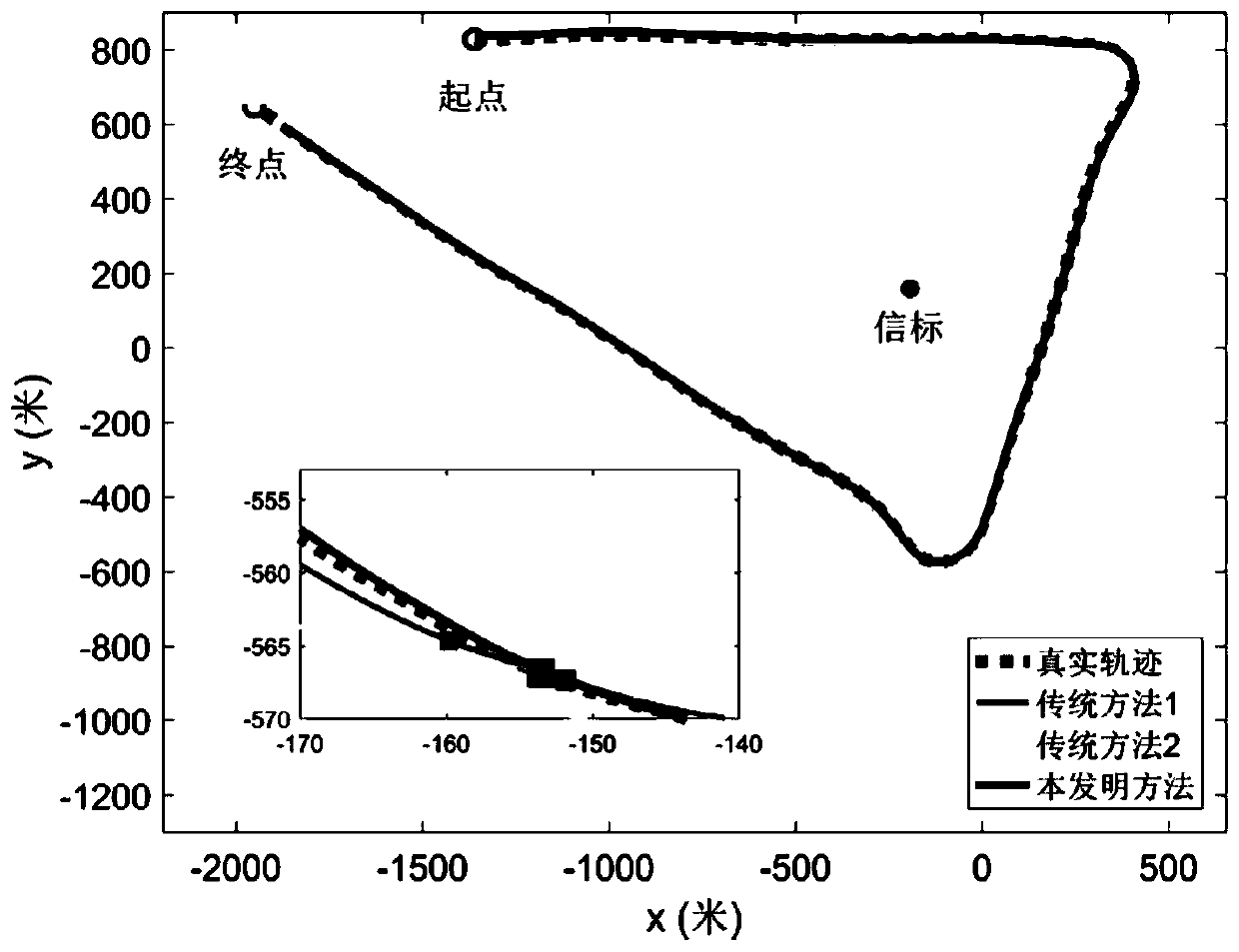
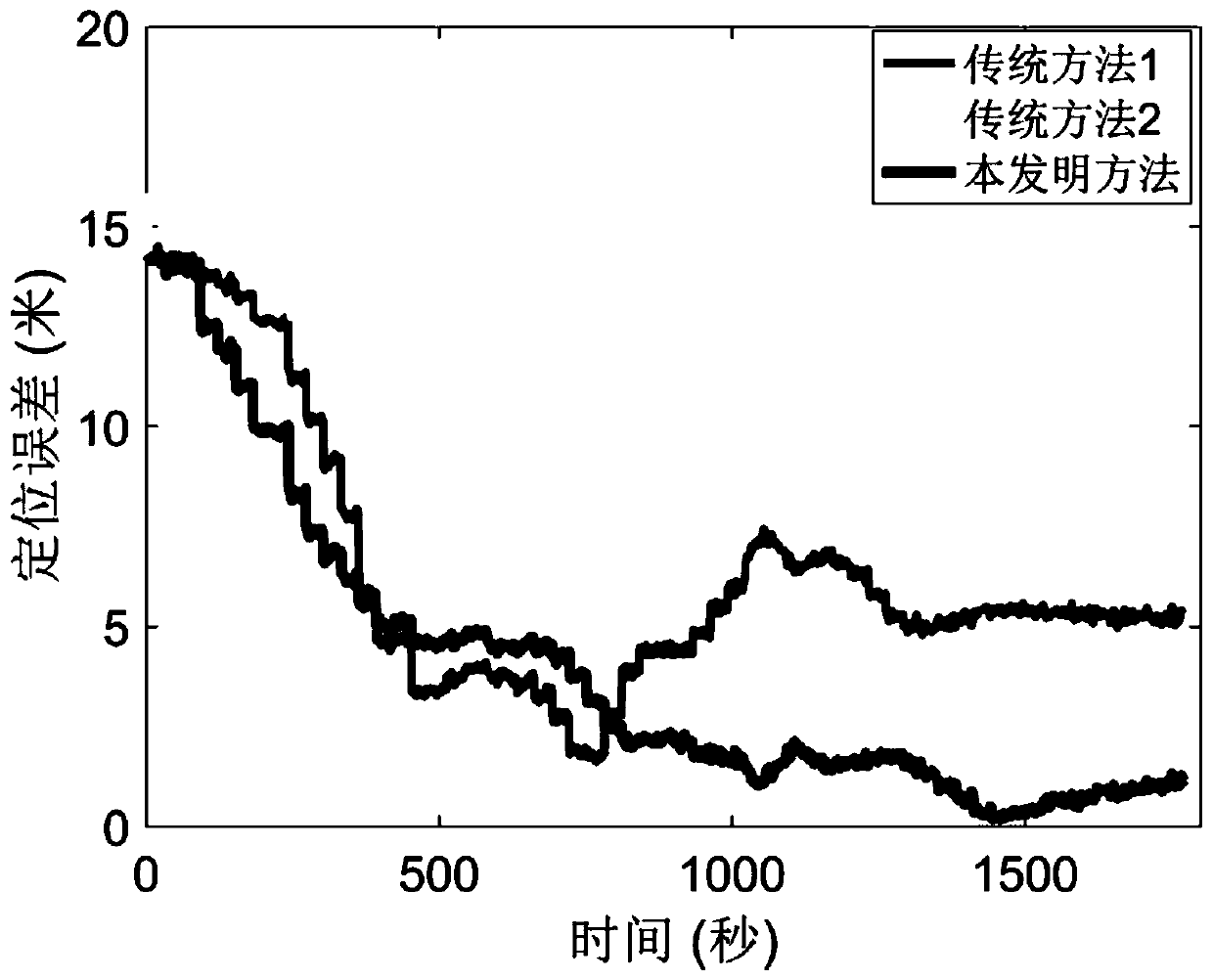
[0321] Example 2, using the method described in Example 1 to verify through test data.
[0322] As a comparison, this embodiment also shows the positioning results of the underwater single beacon positioning method based on the Gauss distribution of sound velocity uncertainty and the known steady underwater sound velocity (respectively marked as traditional method 1 and traditional method 2, traditional method 1 refers to Literature Z.Zhu and S.L.J.Hu, "Model and algorithm improvement on single beacon underwater tracking," IEEE Journal of Oceanic Engineering, vol.PP, no.99, pp.1–18, 2017.).
[0323] The method of collecting test data is as follows: the surface ship is equipped with GPS, hydrophone and compass, and performs two-dimensional motion on the water surface. The trajectory of the surface ship observed by GPS is used as a real reference, and the hydrophone receives the underwater acoustic signal emitted by the underwater acoustic beacon fixed on the bottom of the water...
Embodiment 3
[0329] Embodiment 3, the algorithm pseudocode of the present invention is summarized as:
[0330]
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More