

Pointer instrument detection and reading identification method based on mobile robot
A mobile robot and instrument detection technology, which is applied in character and pattern recognition, instruments, image data processing, etc., can solve the problems of angle inclination, high image quality requirements, and poor detection effect of small targets in low-definition and low-light conditions, and achieve Avoid background interference, overcome manual adjustment parameters, excellent anti-interference effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
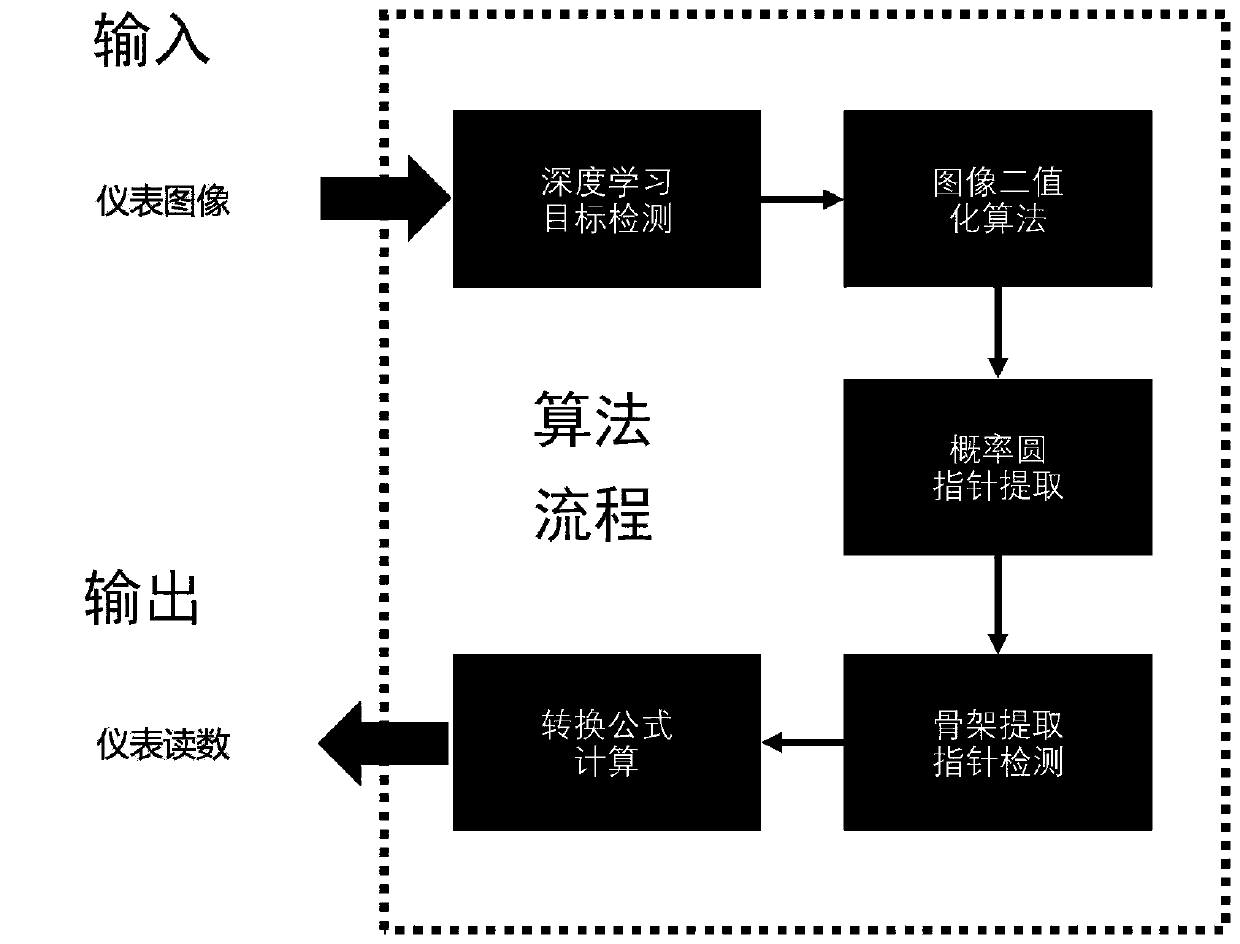
[0061] The present invention will be described in detail below in conjunction with the accompanying drawings and embodiments. The embodiment is based on the specific implementation carried out on the premise of the technical solution of the present invention, and provides detailed implementation methods and processes. However, the protection scope of the claims of the present application is not limited to the description of the following embodiments. The algorithm flow is as follows figure 1 As shown, the steps are as follows:
[0062] [1] Acquire and detect environment images. Obtain the current environment image through the camera, use it as the system input, and pass it to the YOLO V3 deep neural network model to detect whether there is an instrument. Among them, the YOLO V3 deep neural network model uses darknet53.conv.74 as the pre-training convolution weight, changes the number of detection categories to 1, and the detection target is the instrument "meter", and makes...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More