

Autonomous seabed deep stratum drilling robot
A robot and formation technology, applied in the field of robotics, can solve the problems of increasing the volume and weight of the robot, large formation damage, and lack of autonomous drilling capabilities, etc., to avoid motor sealing problems, reduce drilling resistance, and wide speed range.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0030] The following examples can make those skilled in the technical field understand the present invention more comprehensively, but do not limit the present invention in any way.
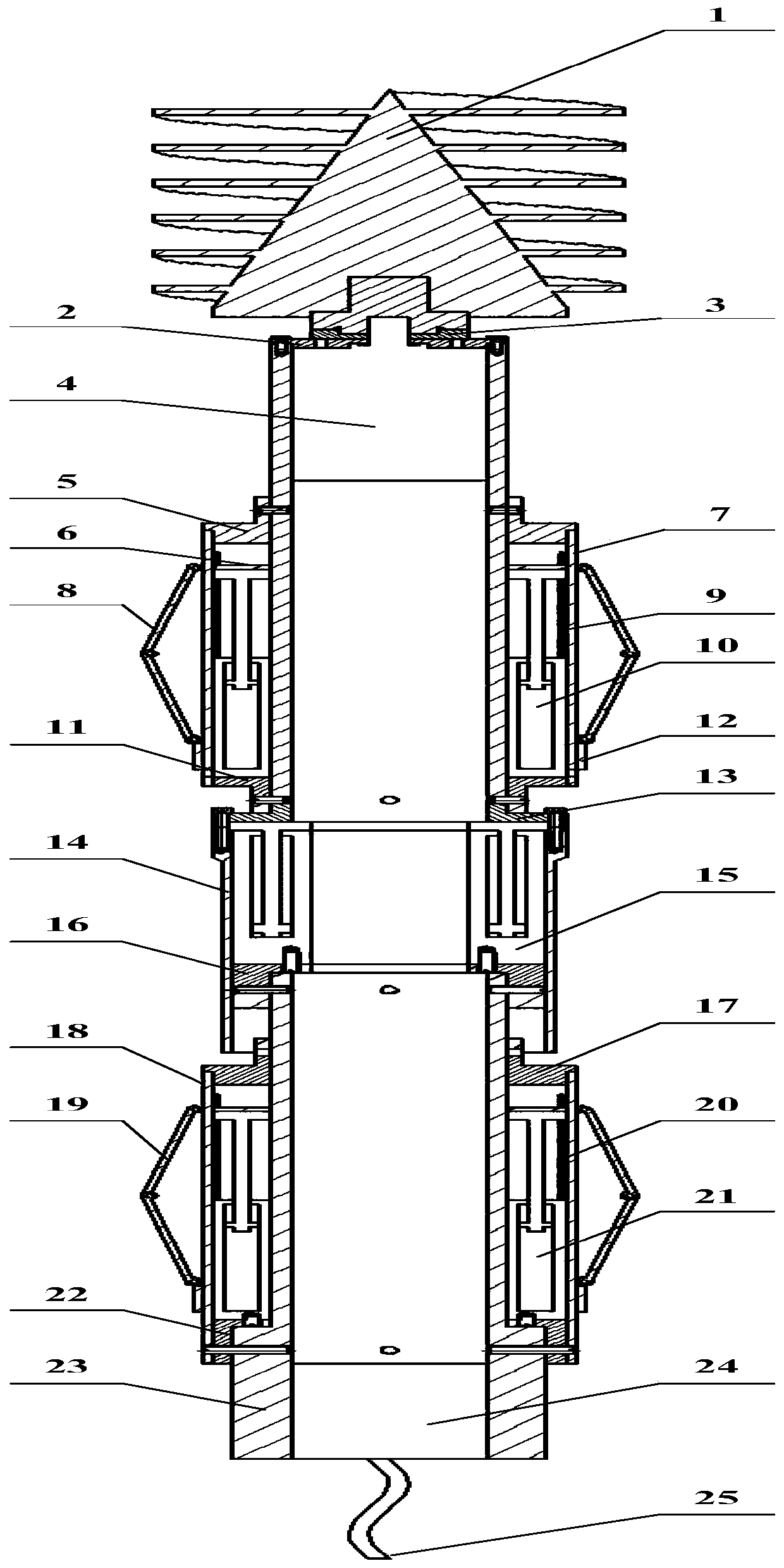
[0031] Such as figure 1 , the present invention is a multi-section structure as a whole, which successively includes a head drilling mechanism, a front support body section, a propulsion body section, a rear support body section and a tail control cabin from top to bottom.
[0032] The head drilling mechanism includes a helical drill bit 1, the tail end of the drill bit 1 is connected to a hydraulic motor through an output shaft, the hydraulic motor is installed in the power cabin 4, the main body of the drill bit 1 is a conical structure, and an equal-pitch helical chip guide is provided outside. A sealing ring 3 is arranged between the drill bit 1 and the power cabin 4, and a power cabin flange 2 is arranged at the front end of the power cabin 4.
[0033] Both the front support body section an...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More