

Distributed relative navigation method oriented to multi-aircraft collaborative formation flying
A technology of formation flight and relative navigation, which is applied in the field of distributed relative navigation of multi-aircraft cooperative formation flight, can solve the problems of unreliability, inability to work alone, low frequency of data collection, etc., to reduce position and speed errors, enhance Anti-jamming ability and the effect of improving navigation accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
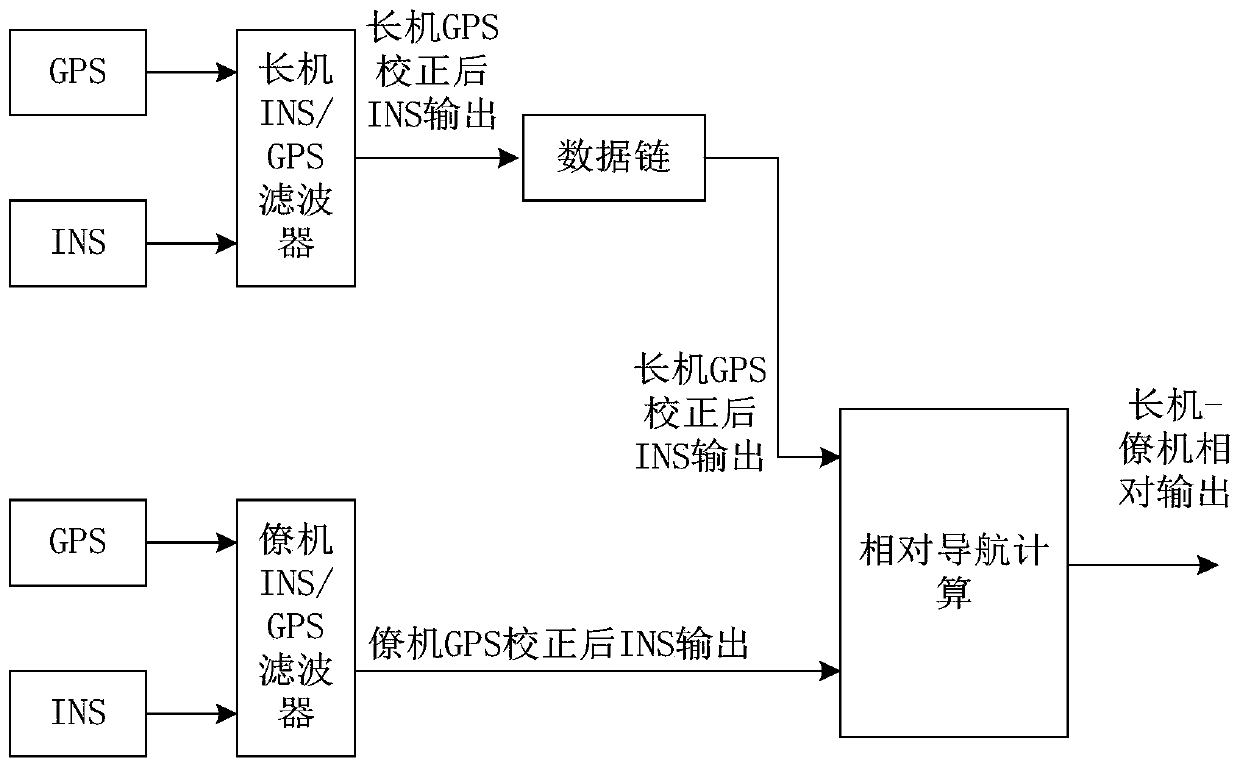
[0039] This embodiment provides a distributed relative navigation system for multiple aircraft to fly in a coordinated formation, where the multiple aircraft include at least one leader and at least one wingman, and all use an integrated navigation system for navigation.
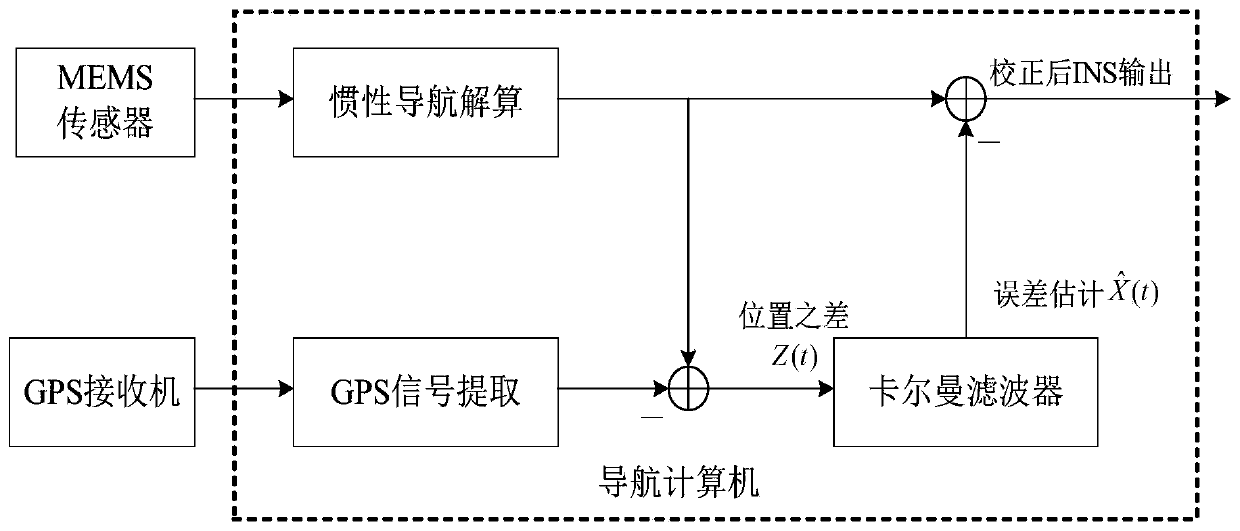
[0040] figure 2 The INS / GPS integrated navigation system of the lead plane and the wingman of this embodiment; such as figure 1 As shown, the integrated navigation system of this embodiment includes a MEMS-SINS navigation system, a GPS navigation system, a Kalman filter and a navigation computer.
[0041] The MEMS-SINS navigation system uses MEMS sensors to obtain the initial reference position and velocity information of the MEMS-SINS navigation system through the initial alignment of the MEMS sensors. In the system startup stage, the initial alignment of the attitude angle is carried out through the magnetic compass, the real-time attitude angle of the system is obtained by recursing the gyro data throug...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More