

Visual identification and picking sequence planning method for oranges on trees and simulation system thereof
A visual recognition, citrus technology, applied in character and pattern recognition, image data processing, instruments, etc., can solve the problem of not considering the size of the fruit, not designing the verification of the robot picking test method, etc., to save the overall picking time and shorten the movement distance. , the effect of high accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
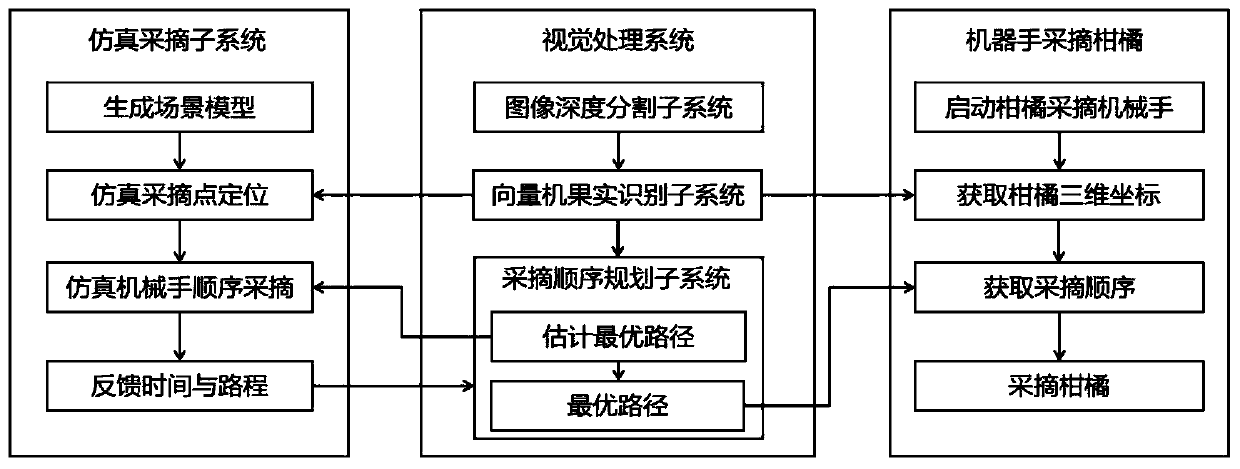
[0037] Visual recognition and picking sequence planning methods for citrus on trees, such as figure 2 As shown, the specific steps are as follows:
[0038] (1) Citrus recognition SVM model training: used to identify the area blocks with citrus. Firstly, the citrus image is cut into multiple fixed-size blocks, and then the block containing citrus is extracted as a positive sample, and the rest are negative samples as a training set. By analyzing the color space and texture information of citrus, extracting representative color features and texture features for training, the citrus block classification model module is obtained.
[0039] (2) SVM model training for extracting citrus pixels: it is used to judge the pixels belonging to citrus in the citrus area block. Select several regional blocks with citrus from the above positive samples, mark the citrus regional blocks, mark the citrus in the regional block as white, and mark the others as black to obtain the label image; co...
Embodiment 2
[0043] The simulation system for the visual recognition and picking sequence planning of citrus on a tree adopts the above-mentioned method for visual recognition and picking sequence planning of citrus on a tree, and specifically includes the following steps: performing three-dimensional modeling according to the actual experimental scene, and then according to the vector The three-dimensional coordinates of the citrus area located by the robot fruit identification subsystem, determine the position information of the citrus model corresponding to the simulation system, combine the size of the citrus model and the picking rules of the simulated manipulator, and determine the three-dimensional coordinates of each picking point in the simulation system; then plan the subsystem according to the picking sequence The obtained citrus picking sequence numbers are used to sort the picking points, such as figure 1 As shown, by sequentially calculating the coordinate difference between t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More