

Unmanned aerial vehicle visual navigation positioning method based on laser ray assistance
A technology of visual navigation and positioning method, which is applied in the field of visual navigation and can solve the problems that the processor cannot run in real time, the price of lidar is expensive, and the volume of lidar is large.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0063] Embodiments of the invention are described in detail below, examples of which are illustrated in the accompanying drawings. The embodiments described below by referring to the figures are exemplary only for explaining the present invention and should not be construed as limiting the present invention.
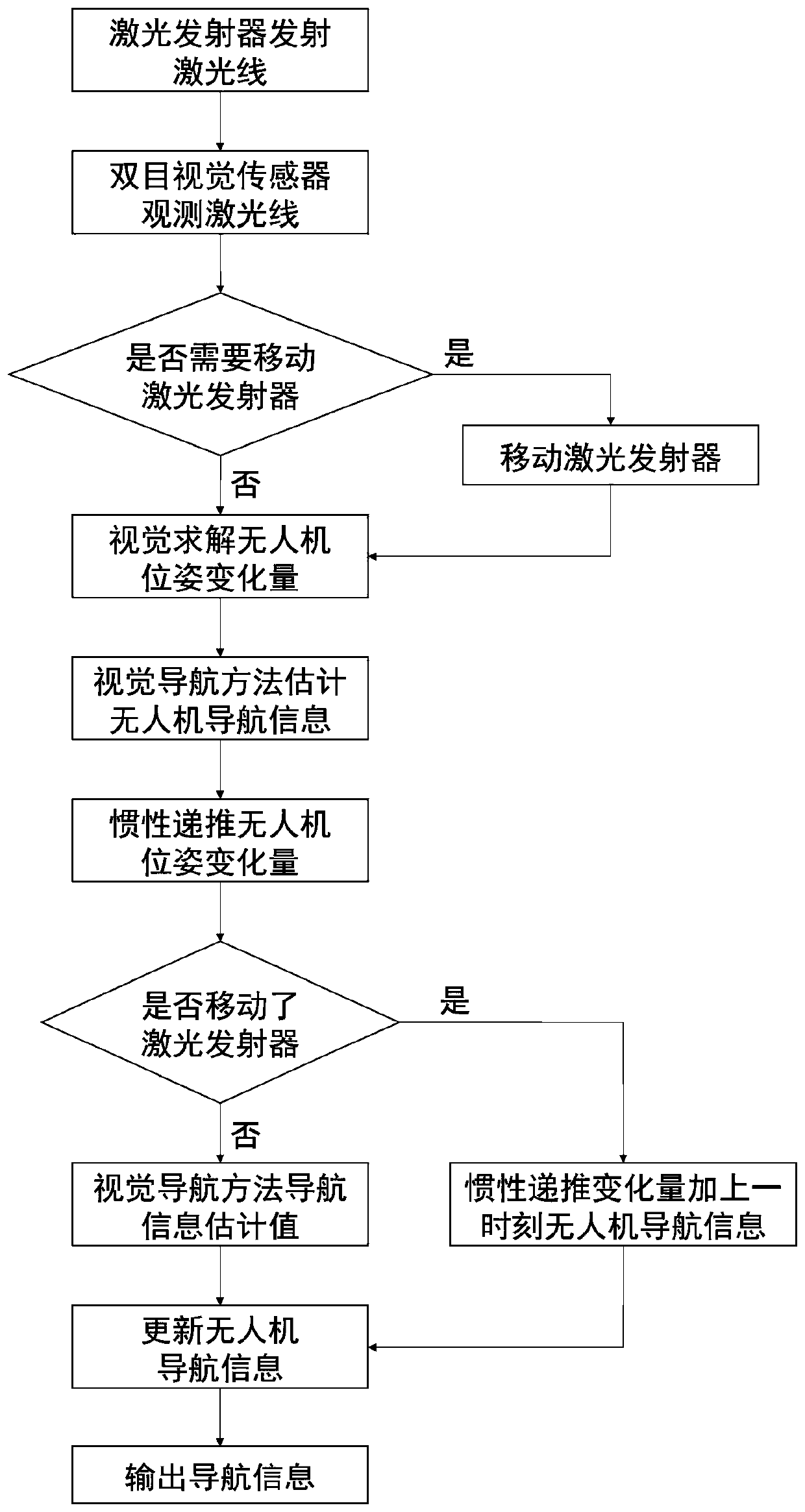
[0064] The flow process of the inventive method is as figure 1 As shown, the specific steps are as follows:
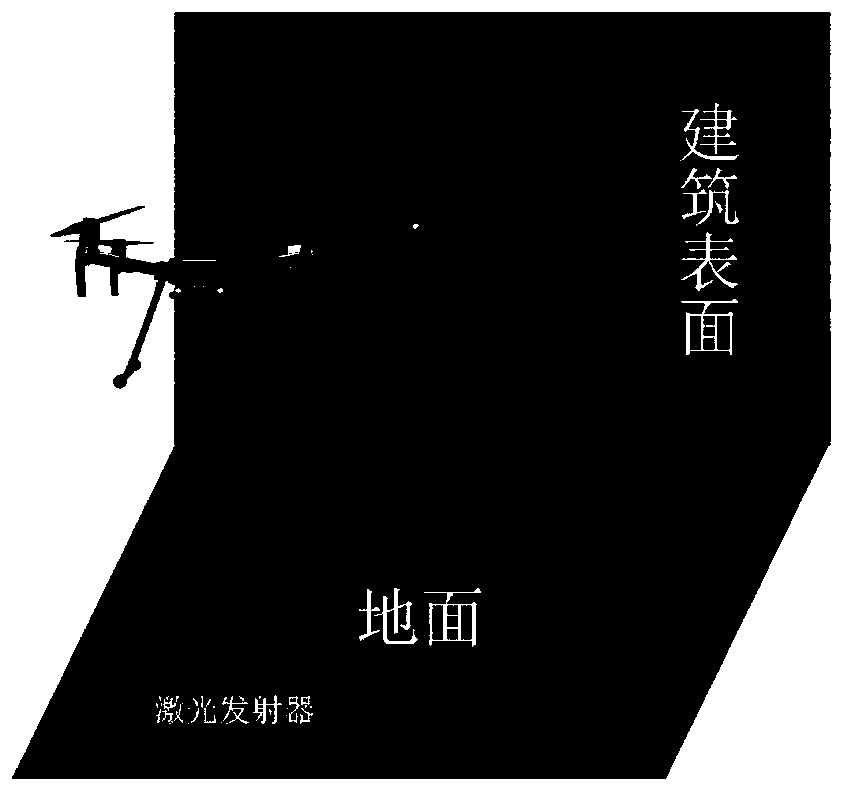
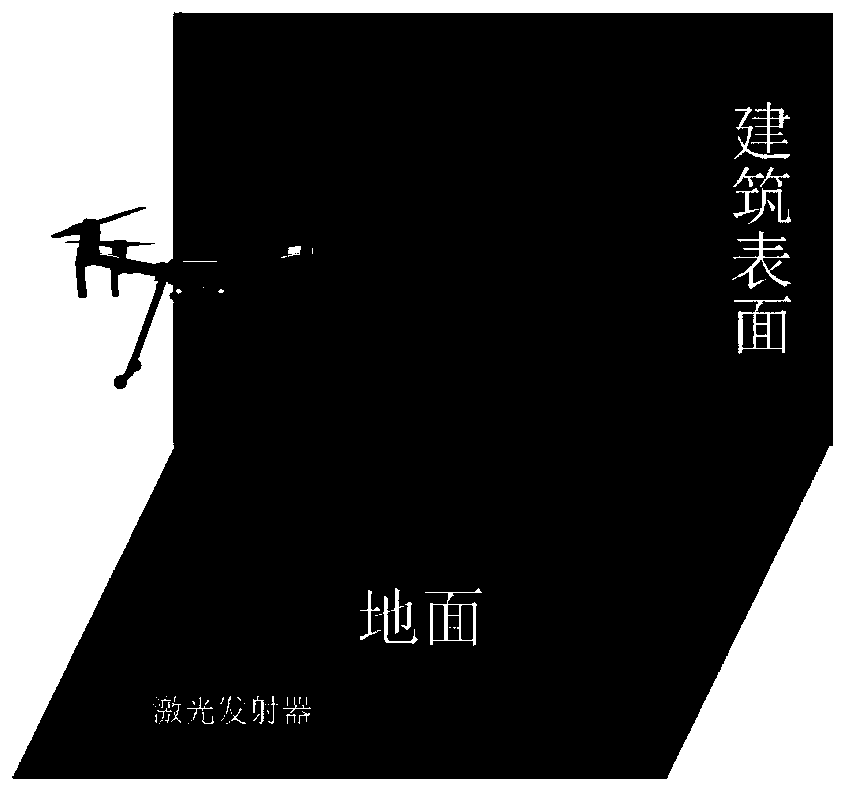
[0065] Step 1: A pre-coded laser line is emitted through a laser transmitter. The laser line is projected on the surface of the building. The laser transmitter can be installed on the ground or carried by another drone. For example, figure 2 and image 3 The medium laser transmitter is installed on the ground, Figure 4 The medium laser transmitter is carried on another drone. Moreover, the laser lines emitted by the laser transmitter can be projected onto the building surface to form evenly distributed laser lines in a large range. For example, figure 2...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More