

Unmanned aerial vehicle autonomous flight method for constructing three-dimensional real scene based on LiDAR data
A drone and three-dimensional technology, applied in 3D modeling, image data processing, three-dimensional position/channel control, etc., can solve the problems of high safety hazards, low patrol efficiency, redundant staffing, etc. , to achieve the effect of preventing UAV from crashing, solving low efficiency and improving operation quality
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
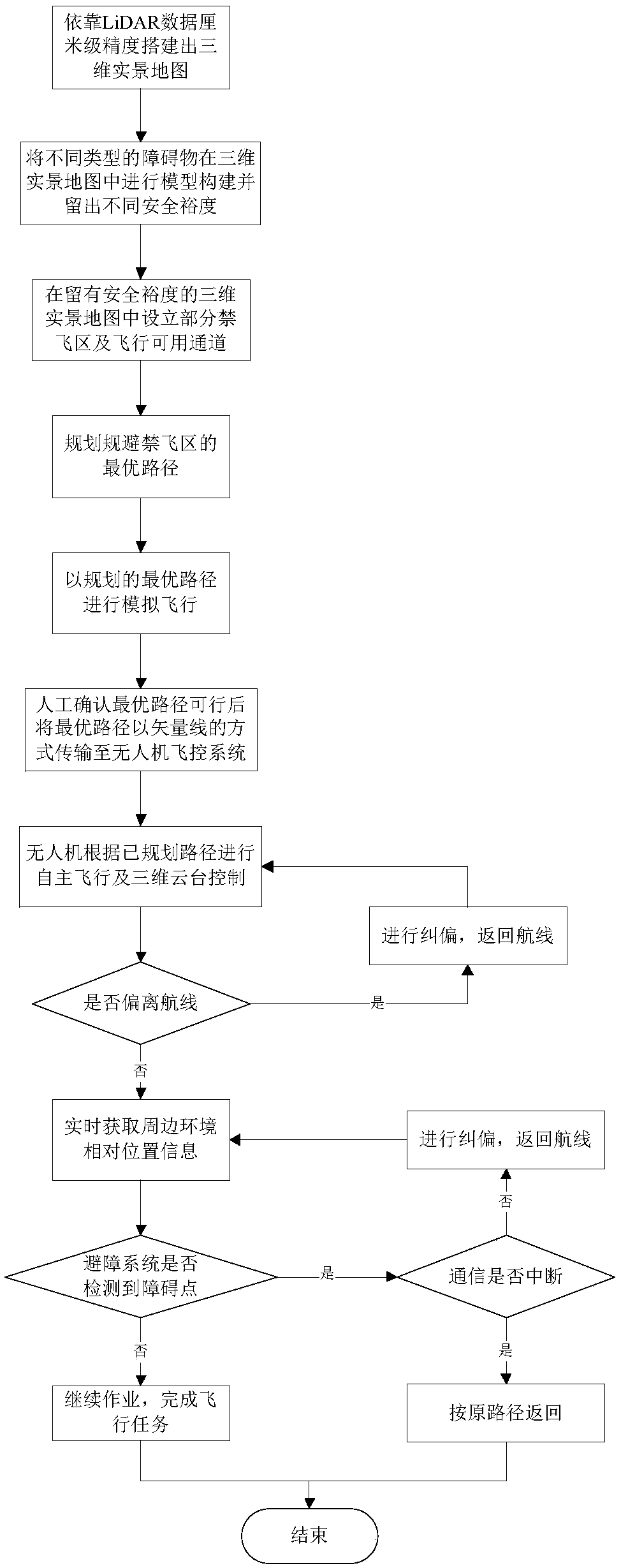
[0024] This embodiment discloses a method for autonomous flight of a UAV based on LiDAR data to construct a three-dimensional real scene,
[0025] The autonomous flying method of the unmanned aerial vehicle comprises the following steps:
[0026] Construct an autonomous flight no-fly zone. The no-fly zone Ω is based on the 3D real scene constructed based on LiDAR point cloud data. Algorithms are used to divide flyable blocks and no-fly blocks to prevent unmanned areas caused by unreasonable path planning. a plane crash occurs;
[0027] Route autonomous planning and flight, the route autonomous planning flight is the process of autonomously planning the optimal flight path of UAV power inspection and realizing autonomous flight based on differential GPS combined with LiDAR data according to the prescribed principles;
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More