

Three-dimensional grabbing platform based on deep learning and grabbing method
A deep learning, three-dimensional technology, applied in the field of robotic arm grasping, can solve problems such as cost increase, increase the complexity of the grasping process, and can not adapt to different postures of objects, achieve low cost, improve efficiency and replaceability, good The effect of precision and real-time
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0024] In order to make the object, technical solution and advantages of the present invention clearer, the present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments. It should be understood that the specific embodiments described here are only used to explain the present invention, and do not limit the protection scope of the present invention.
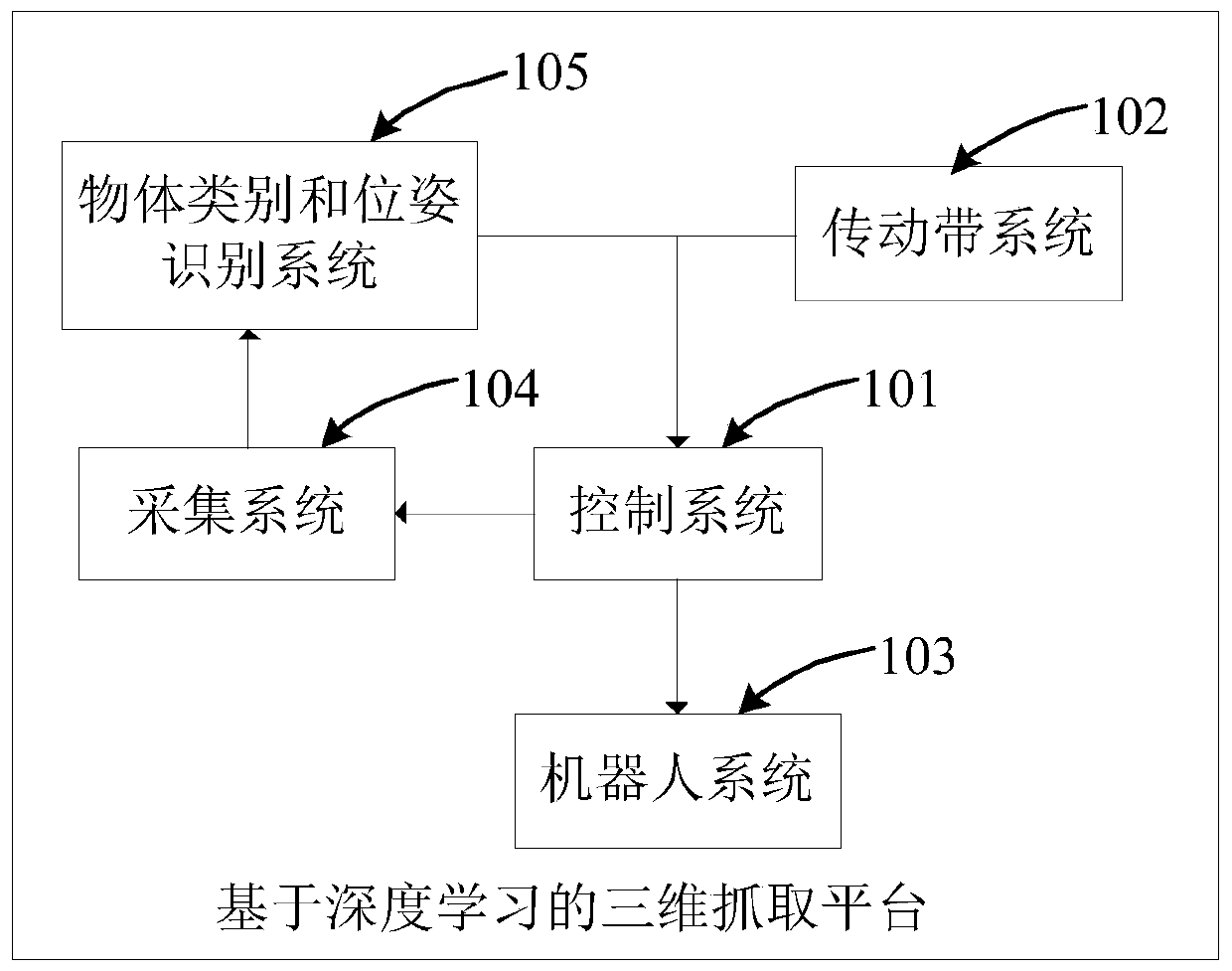
[0025] figure 1 Schematic diagram of the structure of the three-dimensional grasping platform based on deep learning provided by the embodiment of the present invention. see figure 1 , The deep learning-based three-dimensional grasping platform provided by the embodiment includes a control system 101 , a belt system 102 , a robot system 103 , an acquisition system 104 , and an object category and pose recognition system 105 .
[0026] Among them, the acquisition system 104 is controlled by the control system 101 to acquire the original three-dimensional point cloud dat...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More