

Multi-source data fusion real-time navigation positioning method and system
A technology of navigation and positioning and multi-source data, which is applied in the field of navigation and positioning, and can solve problems such as the inability to realize navigation and positioning and the reduction of GNSS positioning accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
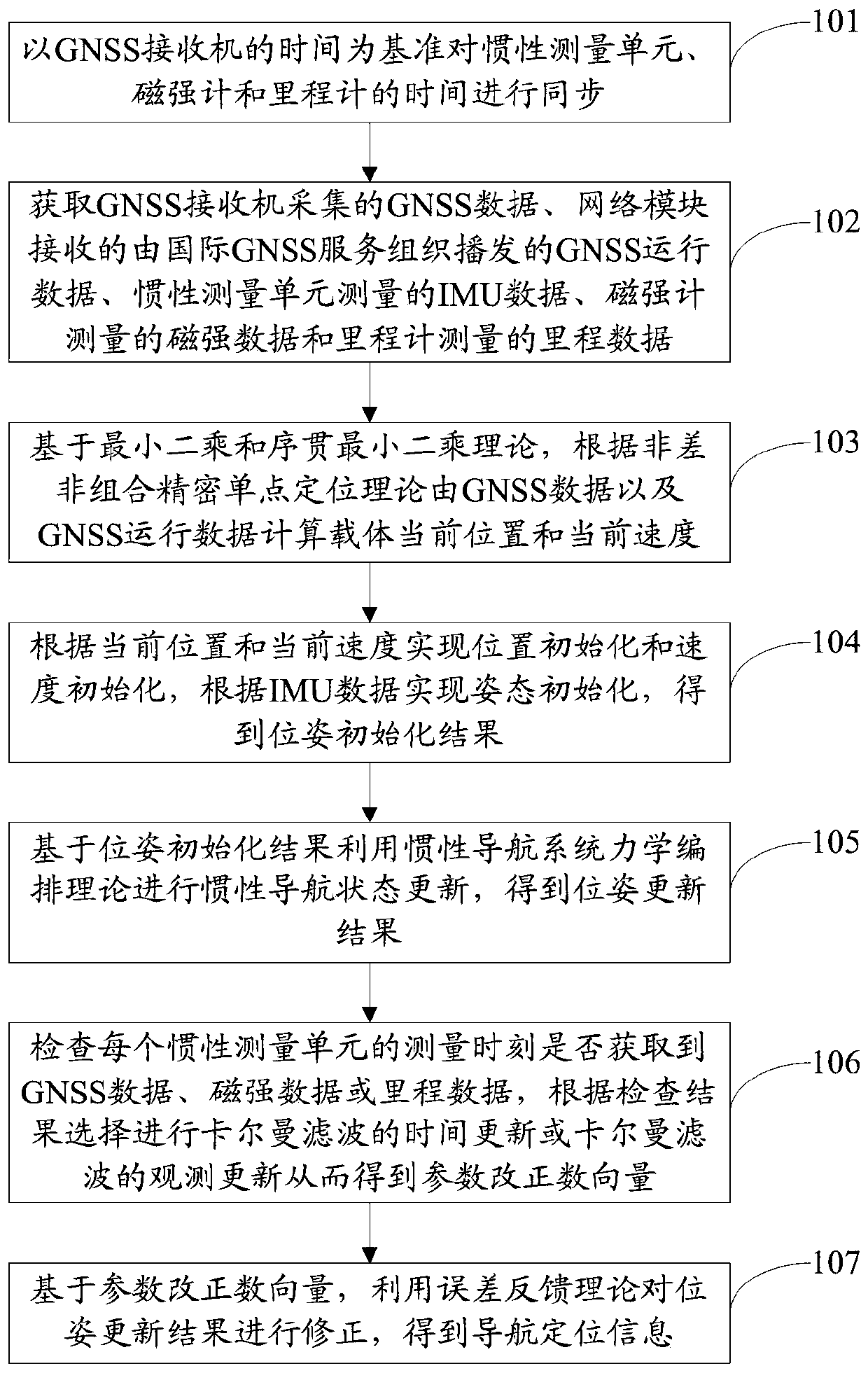
[0065] figure 2 It is a method flowchart of the multi-source data fusion real-time navigation and positioning method in Embodiment 1.
[0066] see figure 2 , the navigation positioning method includes:
[0067] Step 101: Synchronize the time of the inertial measurement unit, the magnetometer and the odometer with the time of the GNSS receiver as a reference.
[0068] Based on the electronic signal time synchronization theory, during data transmission, GNSS time (toc GNSS ) as a benchmark, by comparing the local time (reciver_t sensors,m ) and the local time when the GNSS data is transmitted to the FPGA board (reciver_t GNSS ) between the time difference:
[0069]
[0070] Calculate time for each sensor
[0071]
[0072] The initial time toc of IMU, magnetometer, and ODO data calculated according to formula (2) based on GNSS time sensors,IMU,0 、toc sensors,GMNS,0 and toc sensors,ODO,0 . Thereafter, the time of IMU, magnetometer, and ODO data in k epochs can be...
Embodiment 2
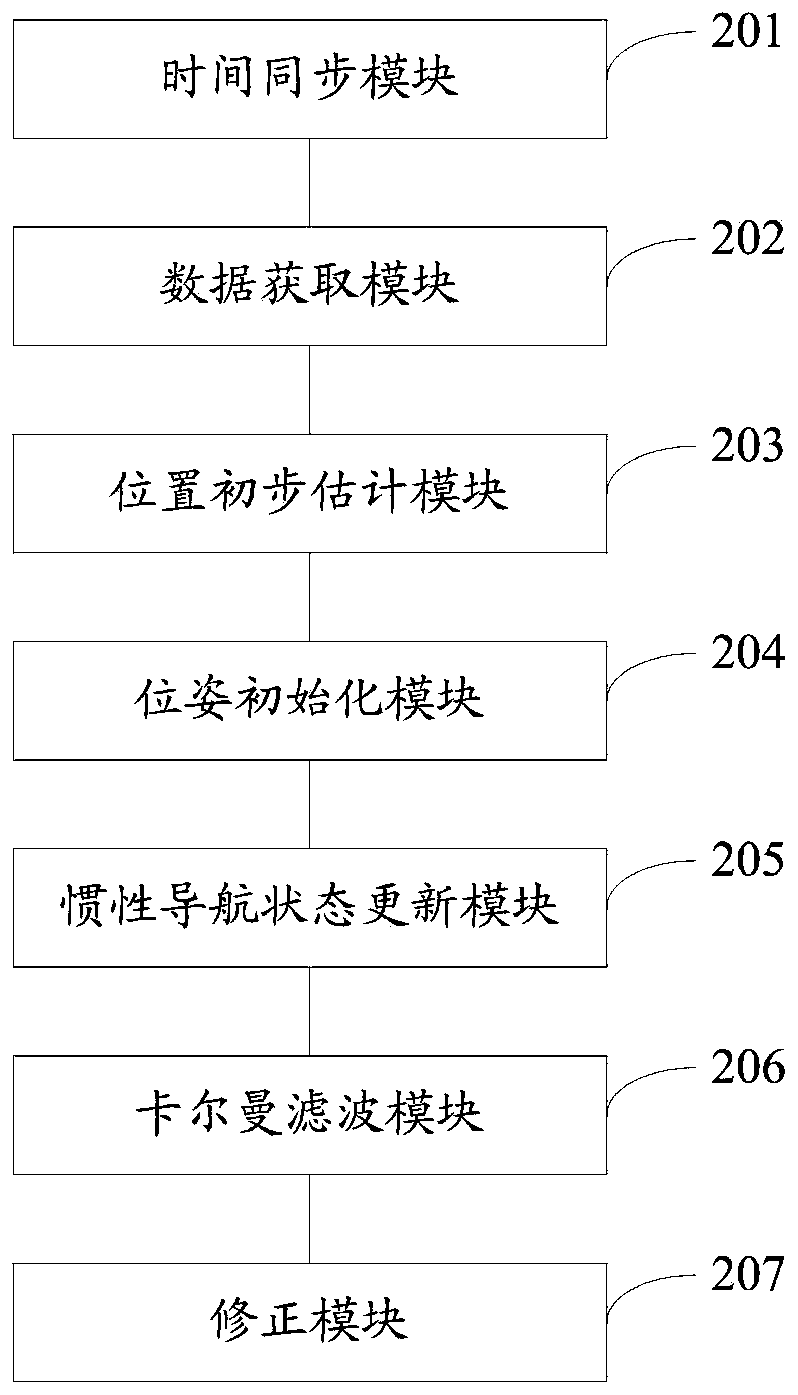
[0168] Embodiment 2 provides a multi-source data fusion real-time navigation and positioning system.
[0169] image 3 It is a system structure diagram of a multi-source data fusion real-time navigation and positioning system according to Embodiment 2 of the present invention.
[0170] see image 3 , the navigation and positioning system includes:
[0171] The time synchronization module 201 is configured to synchronize the time of the inertial measurement unit, the magnetometer and the odometer with the time of the GNSS receiver as a reference.
[0172]The data acquisition module 202 is used to obtain the GNSS data collected by the GNSS receiver, the GNSS operation data broadcast by the international GNSS service organization received by the network module, the IMU data measured by the inertial measurement unit, the magnetic intensity data measured by the magnetometer and the odometer Measured mileage data.
[0173] The preliminary position estimation module 203 is used t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More