

Robot-assisted puncture operation end tool center calibration method based on stereoscopic vision
A robot-assisted, end-tool technology, which is applied in surgical robots, surgery, puncture needles, etc., can solve the problems that the puncture needles are difficult to apply to small targets and introduce large errors, and achieve precise puncture, precise control, and puncture effects.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
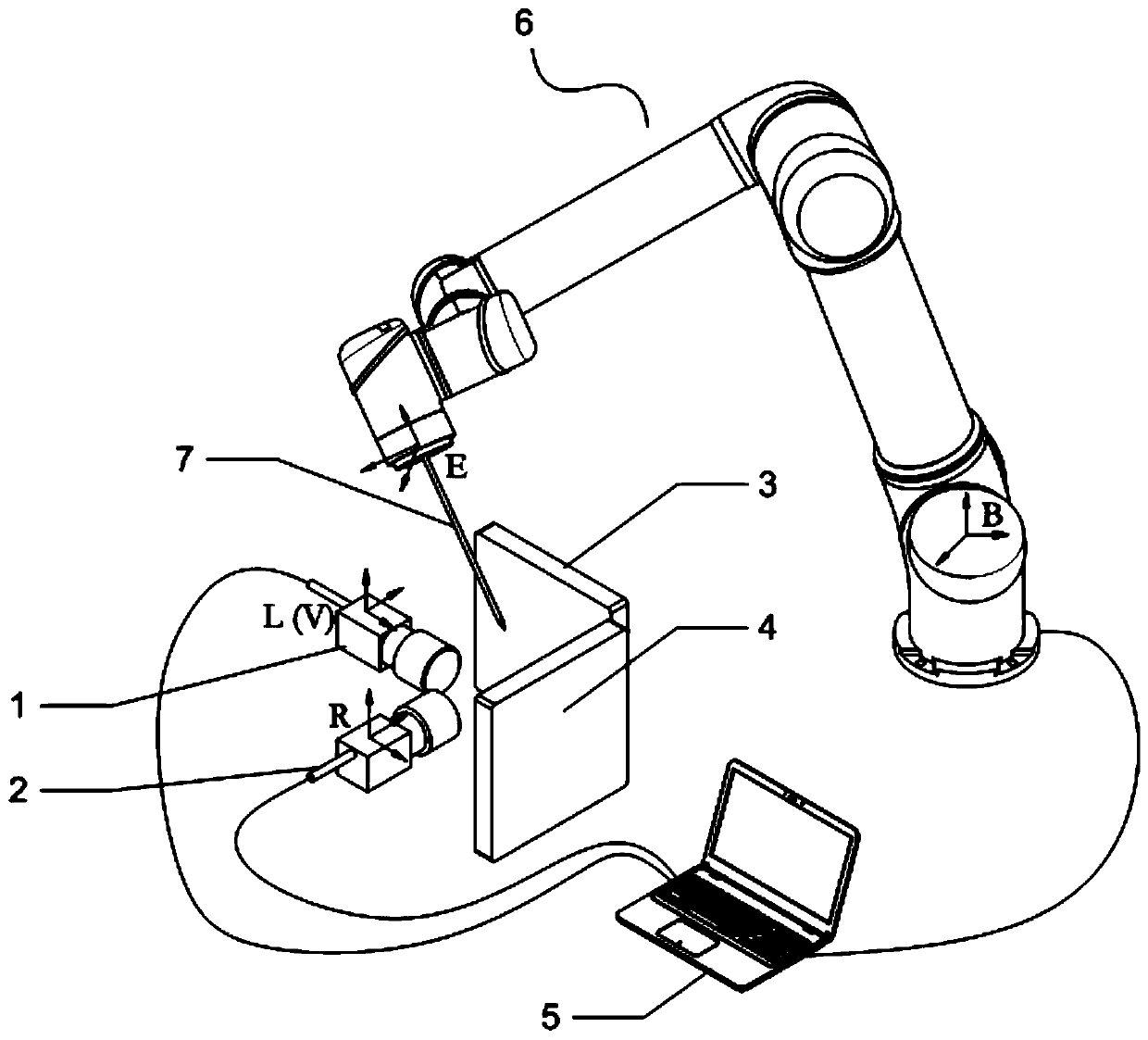
[0051] Specific implementation mode one: the following combination figure 1 The method for calibrating the end tool center of robot-assisted puncture surgery based on stereo vision according to this embodiment will be described.
[0052] The computer 5 gives instructions to the mechanical arm 6 to realize the movement. The surgical needle 7 is installed at the end of the mechanical arm 6. The positional relationship of the coordinate system E at the end of the mechanical arm relative to the base coordinate system B of the robot is determined. The calibration method in this embodiment is calibration operation The relative positional relationship of the needle tip of the needle 7 with respect to the coordinate system E at the end of the mechanical arm, after calibration, the position of the needle tip can be obtained no matter how the mechanical arm carries the surgical needle 7 in motion.
[0053] first of all, yes figure 1 The coordinate systems involved are described as foll...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More