

External-field-driven double-leg standing and walking magnetic micro-robot and gait control method thereof
A technology of micro-robots and gait control, which is applied to manipulators, motor vehicles, manufacturing tools, etc., can solve the problems of low moving efficiency, complex driving methods, and single motion forms of micro-robots, and achieve good processing quality and rich motion forms , The control strategy is simple and efficient
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
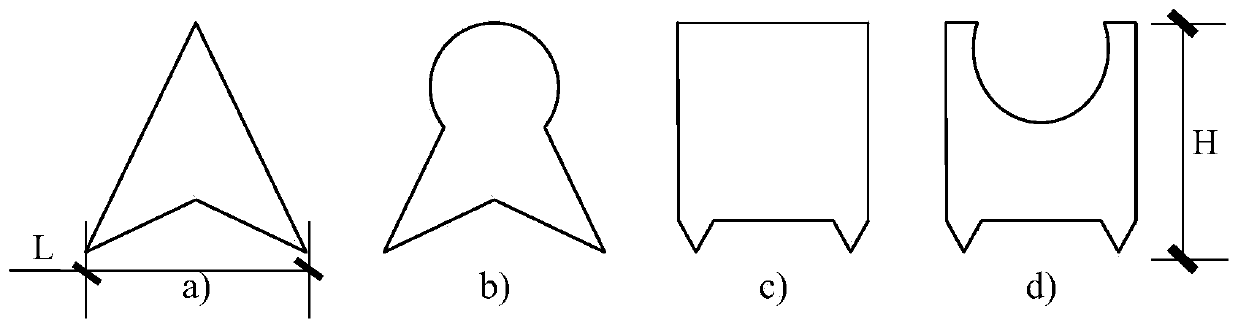
[0030] Specific embodiment one: a magnetic microrobot driven by an external field to stand and walk with two legs described in this embodiment has a symmetrical sheet structure with two legs, the characteristic length H (the characteristic length refers to the height of the microrobot) is less than or equal to 1mm, and the thickness Less than or equal to 0.1mm. This size ensures that the micro-robot can move flexibly in a narrow space below 1 cm, ensuring its work efficiency.
specific Embodiment approach 2
[0031] Embodiment 2: The robot has a double leg structure, the legs are parallel to each other or at a certain angle, there is a gap between the legs, and the bottoms of the legs are pointed, which reduces the contact area between the robot and the surface. Reduce the interaction force between them and improve the movement efficiency. Others are the same as the first embodiment.
specific Embodiment approach 3
[0032] Embodiment 3: The distance L between the legs of the robot is 0.7-1 times the characteristic length H, and the shape of the robot is slender, which is convenient for the robot to carry out micro-operations and other tasks. Others are the same as in the second embodiment.
PUM
| Property | Measurement | Unit |
|---|---|---|
| Length | aaaaa | aaaaa |
| Thickness | aaaaa | aaaaa |
Abstract
Description
Claims
Application Information
 Login to View More
Login to View More