

Visualization system for welding robot and using method of visualization system
A welding robot and welding system technology, applied in the field of visualization systems, can solve the problems of high safety hazards for operators, short effective working hours, and large dimensions, and achieve simple structural layout, friendly and uniform, reduced labor intensity and The effect of auxiliary time
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0033] This embodiment discloses a visualization system for a welding robot, including a welding system, a vision system, a control system and a drive system.
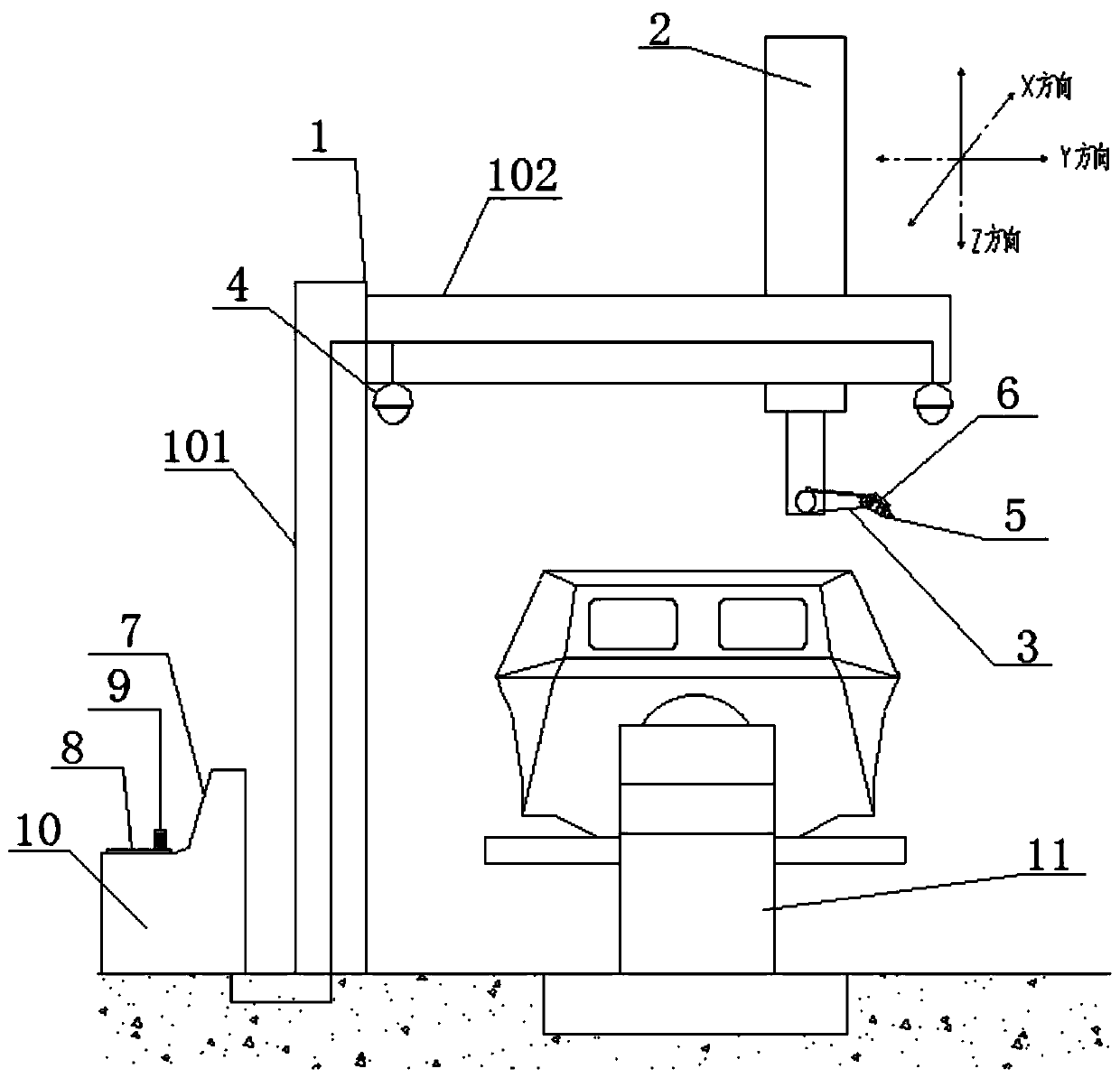
[0034] see figure 1 , the welding system includes a frame 1, a welding arm 2 and a welding torch 3.
[0035] The frame 1 includes beams 101 and support columns 102 . The support column 102 is installed vertically on the ground. The beam 101 is welded and fixed on the upper end of the support column 102 and is perpendicular to the support column 102 . The crossbeam 101 is equipped with a longitudinal guide rail X, a transverse guide rail Y and a vertical guide rail Z. A three-dimensional coordinate system oxyz is established on the crossbeam 101. The longitudinal guide rail X is located in the x-axis direction, and the transverse guide rail Y is located in the y-axis direction. The guide rail Z is located in the z-axis direction.
[0036] The welding arm 2 is vertically installed on the beam 101 . The welding arm 2...
Embodiment 2
[0045] This embodiment provides a relatively basic implementation, including a welding system, a vision system, a control system and a drive system.
[0046] see figure 1 , the welding system includes a frame 1, a welding arm 2 and a welding torch 3.
[0047] The frame 1 includes beams 101 and support columns 102 . The support column 102 is installed vertically on the ground. The beam 101 is welded and fixed on the upper end of the support column 102 and is perpendicular to the support column 102 . The welding arm 2 is vertically installed on the beam 101 .
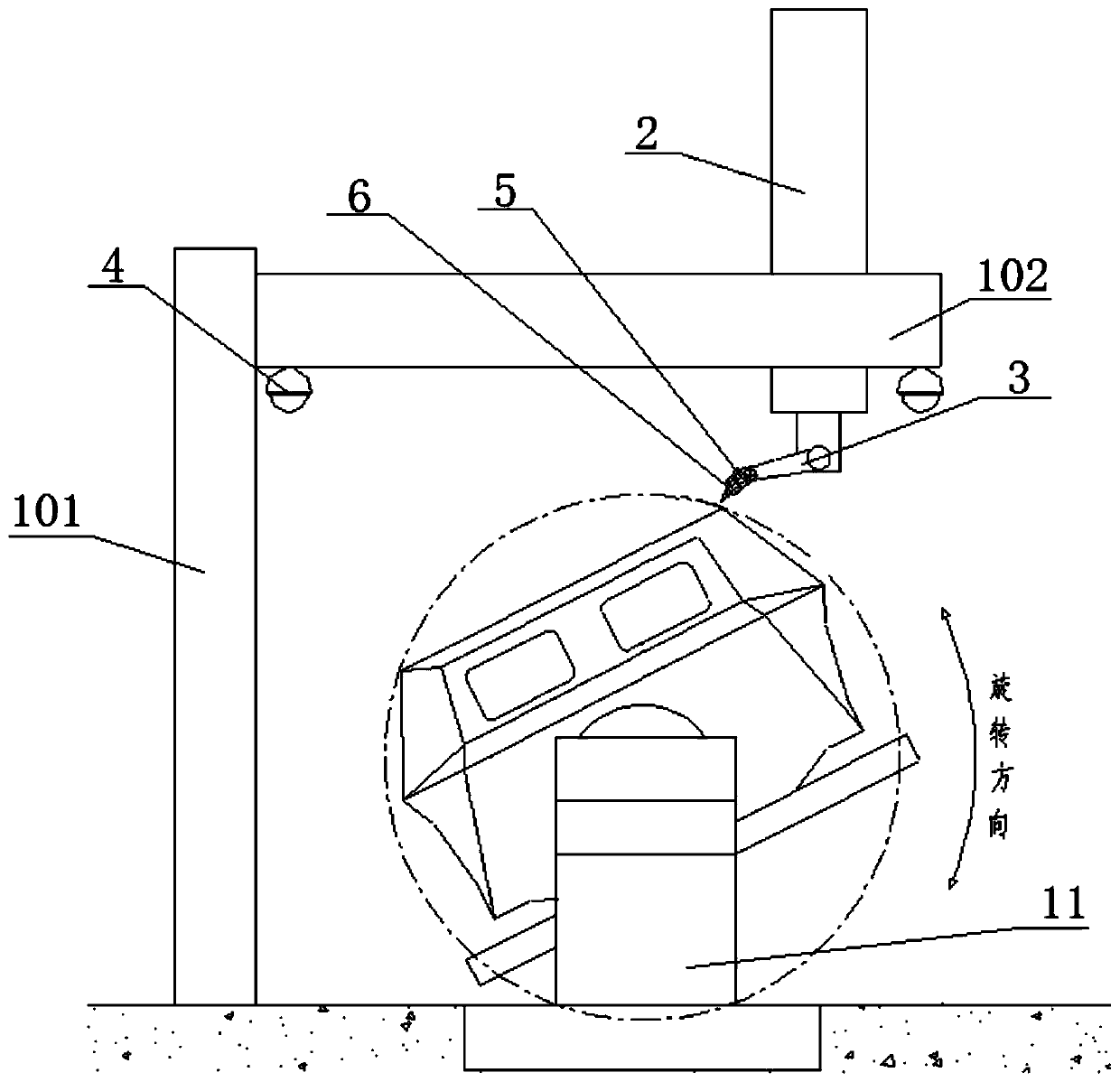
[0048] The welding torch 3 is mounted on the lower end of the welding arm 2 . The welding arm 2 has a human-like arm motion simulation function, and through its built-in joint mechanism, the welding torch 3 can be made to move in any angle and direction.
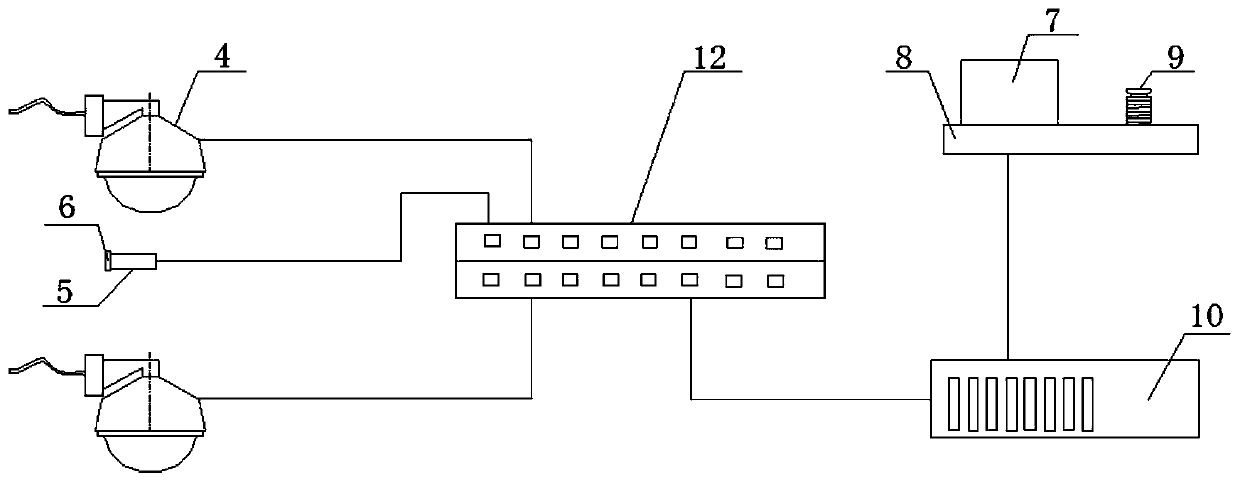
[0049] The vision system includes two spherical cameras 4 and a bullet camera 5. In this embodiment, both the spherical camera 4 and the bullet camera 5 are high-d...
Embodiment 3
[0056] The main structure of this embodiment is the same as that of Embodiment 2. Further, the longitudinal guide rail X, the horizontal guide rail Y and the vertical guide rail Z are installed on the beam 101, and a three-dimensional coordinate system oxyz is established on the beam 101, and the longitudinal guide rail X is located in the x-axis direction. , the horizontal guide rail Y is located in the y-axis direction, and the vertical guide rail Z is located in the z-axis direction.
[0057] The welding arm 2 is respectively equipped with driving devices moving along the directions of the longitudinal guide rail X, the transverse guide rail Y and the vertical guide rail Z, so that the welding arm 2 can move in the directions of x, y and z.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More