

Lane line extraction method and device and computer equipment
A lane line and camera technology, applied in the computer field, can solve problems such as inability to effectively and accurately extract lane line information, and achieve the effects of enhancing scientificity, reducing costs, and reducing risk factors
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0025] Hereinafter, the present application will be described in detail with reference to the accompanying drawings and embodiments. It should be noted that, in the case of no conflict, the embodiments in the present application and the features in the embodiments can be combined with each other.
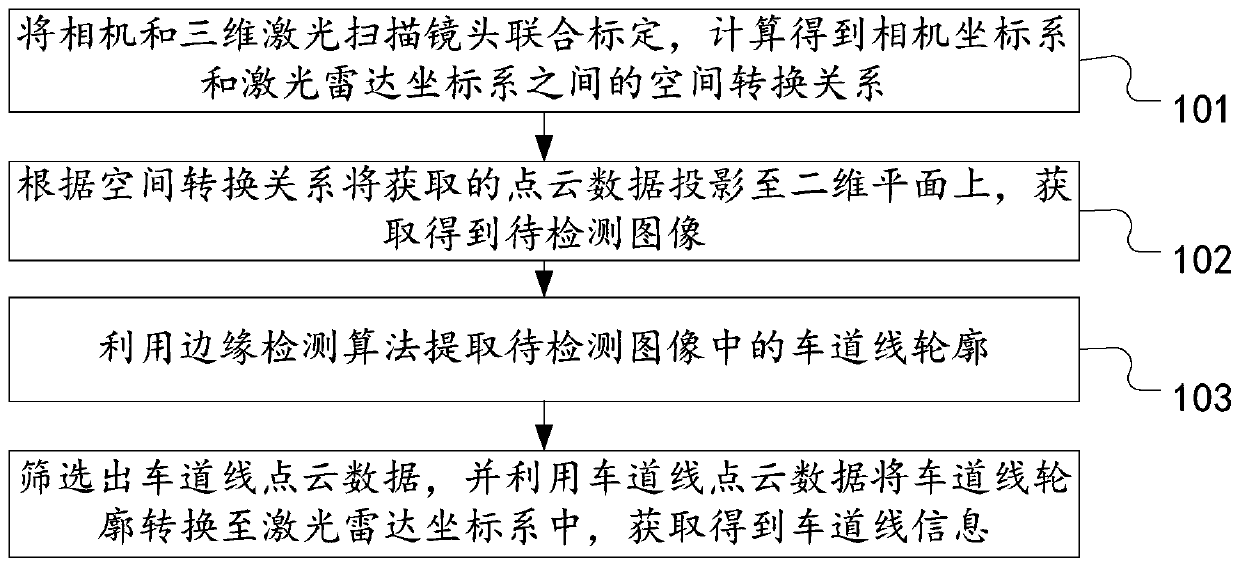
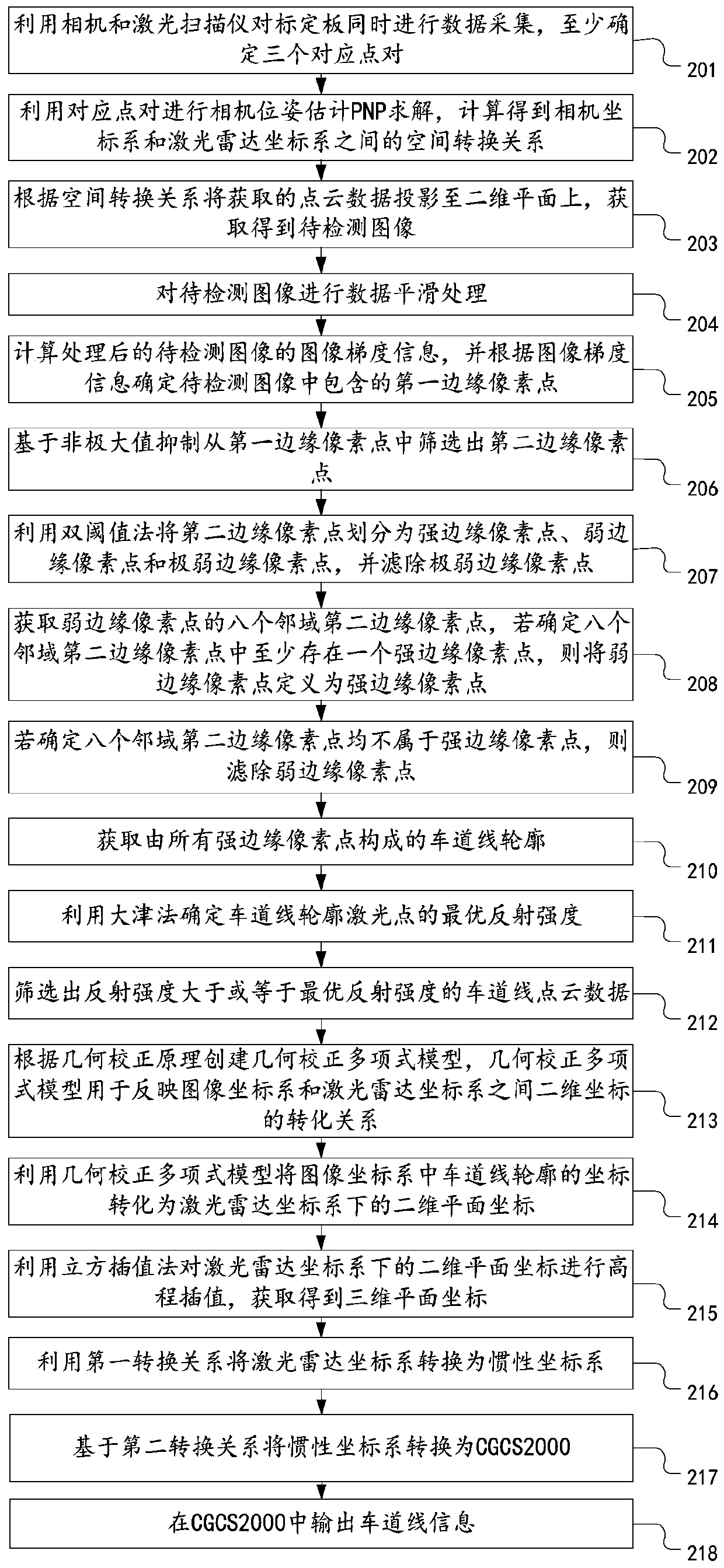
[0026] In view of the problem that the existing single lane line extraction method cannot effectively and accurately extract lane line information, the embodiment of the present application provides a lane line extraction method, such as figure 1 As shown, the method includes:
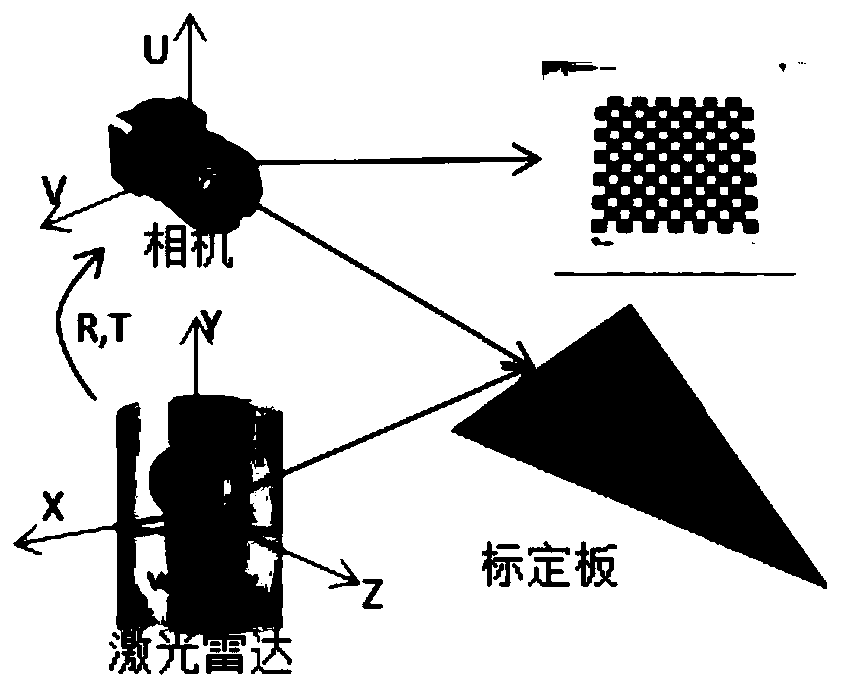
[0027] 101. The camera and the three-dimensional laser scanning lens are jointly calibrated, and the spatial conversion relationship between the camera coordinate system and the laser radar coordinate system is calculated.
[0028] In a specific application scenario, when performing target detection, the camera and the lidar can be calibrated jointly, and the spatial transformation relationship between the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More