

Customized harmonic repetitive controller and control method
A repetitive controller and repetitive control technology, applied in the direction of controllers with specific characteristics, electric controllers, adaptive control, etc., can solve the problems of improving the performance of the controller and the inability to construct high-order repetitive controllers, etc., to achieve flexible improvement sexual effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
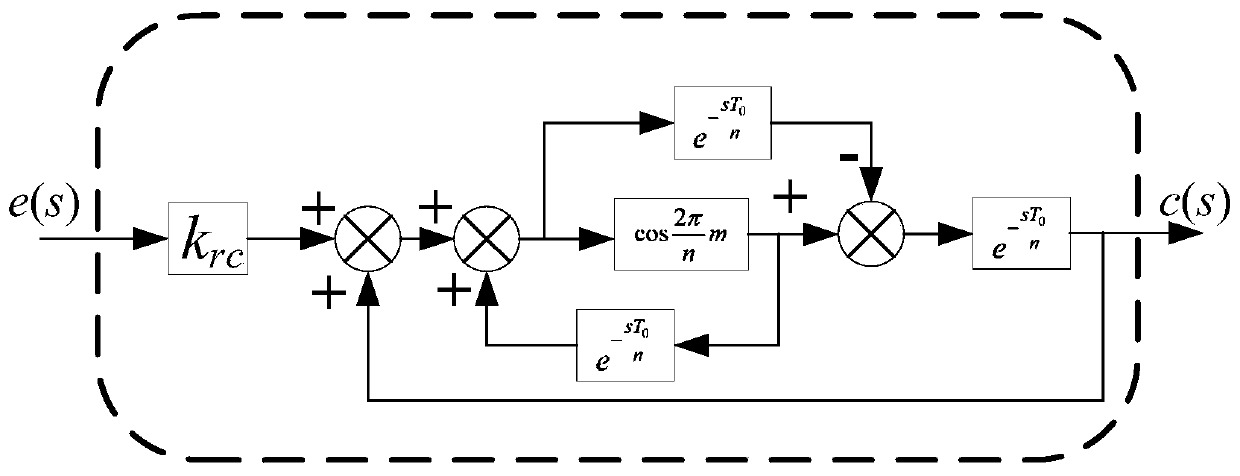
[0089] This embodiment provides a repetitive controller, which includes: a repetitive control gain module, a positive feedforward gain module, a subtraction loop, two addition loops, and three identical time delay modules;
[0090] Wherein, the input terminal of the repetitive control gain module is used as the input terminal of the repetitive controller, the output terminal of the repetitive control gain module is used as the first input terminal of the first adding loop, and the output terminal of the first adding loop is used as the input terminal of the second adding loop. The first input terminal, the output terminal of the second addition loop are respectively connected in series with the positive feedforward gain module and the first time delay module, followed by the positive input terminal and negative input terminal of the subtraction loop, and the output terminal of the subtraction loop is connected in series with the second time delay The module is connected to the ...
Embodiment 2
[0153] The (nk±m) harmonic repetition controller given in the first embodiment above and the further extended h-order (nk±m) harmonic digital repetition controller can be added to the general In the feedback control system, it is used to eliminate the (nk±m) harmonic component in the control error. The (nk±m) order harmonic repetition controller and the h order (nk±m) order harmonic digital repetition controller obtained by further expansion are introduced as follows:
[0154] (1) For (nk±m) harmonic repetition controller
specific Embodiment approach
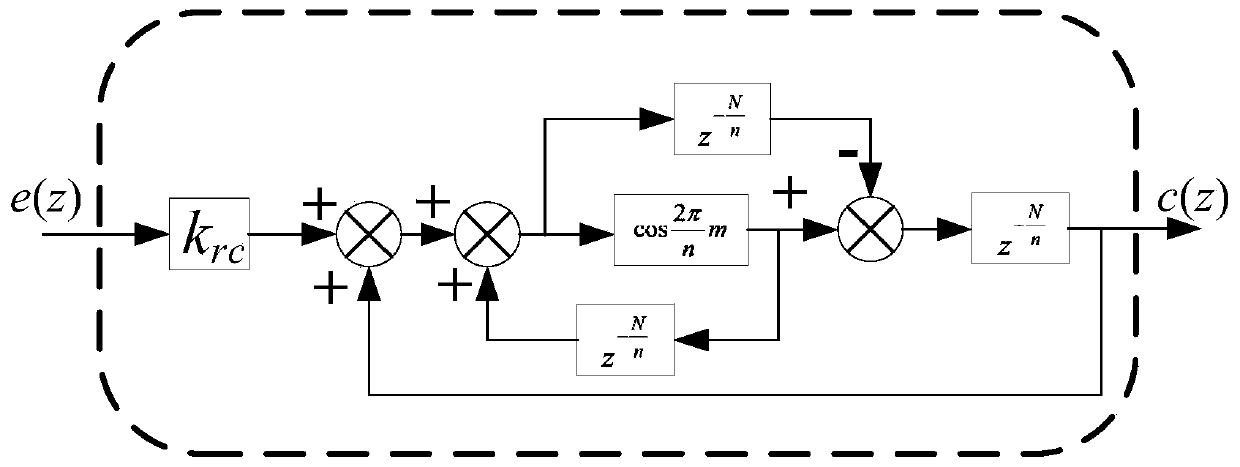
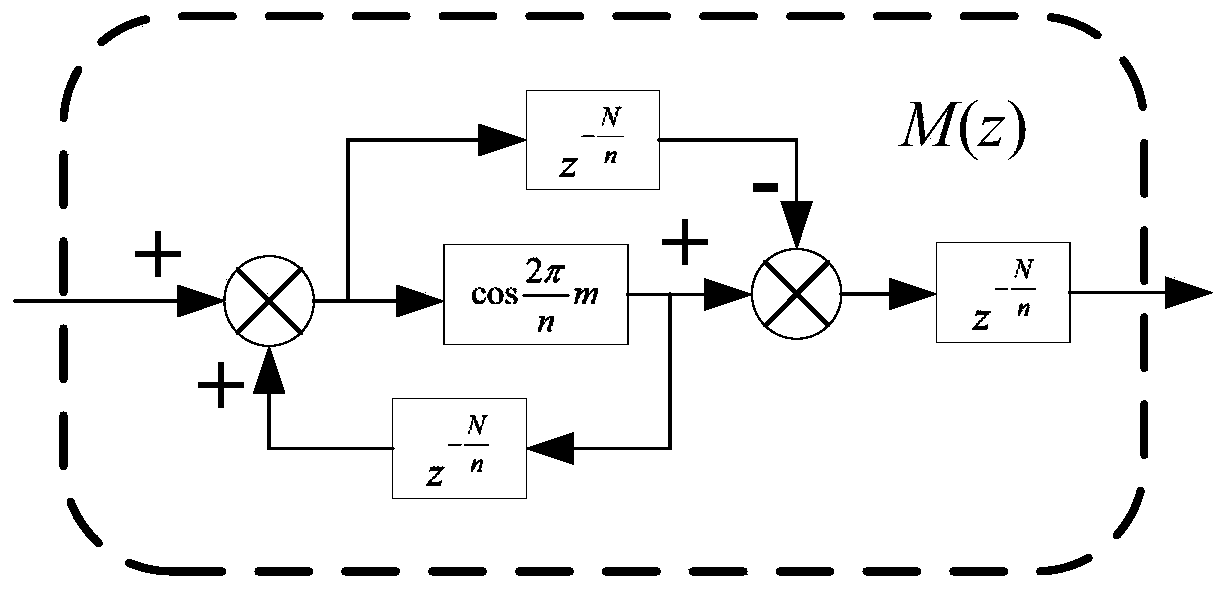
[0156] Figure 17 Shown is the structural block diagram of adding the improved (nk±m) harmonic digital repetition controller to the general feedback control system, where G rc (z) is an improved (nk±m) harmonic digital repetition controller, G c (z) is a conventional feedback controller, G p (z) is the control object, y d (z) is the reference input of the system and is generally the fundamental wave reference signal y(z) is the actual output of the system, e(z) is the error between the reference and the actual signal and is also the repeating controller G rc (z) is the input signal, c(z) is the repetitive controller G rc The output signal of (z) is also added together with the error signal e(z) as a conventional feedback controller G c (z) input, u(z) is the conventional feedback controller G c The output signal of (z) is also the control object G p The input signal of (z), d(z) is the disturbance input signal of the system, which is related to the control object G p Th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More