Intelligent manipulator with rotating and clamping functions
A technology of intelligent manipulators and functions, applied in the direction of manipulators, program-controlled manipulators, chucks, etc., can solve the problems that manipulators cannot be realized, and achieve the effects of automatic operation, labor-saving and convenient operation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
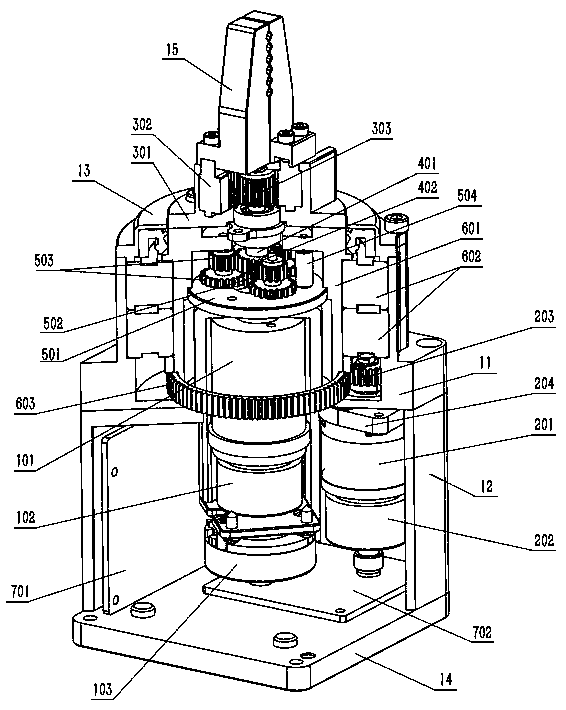
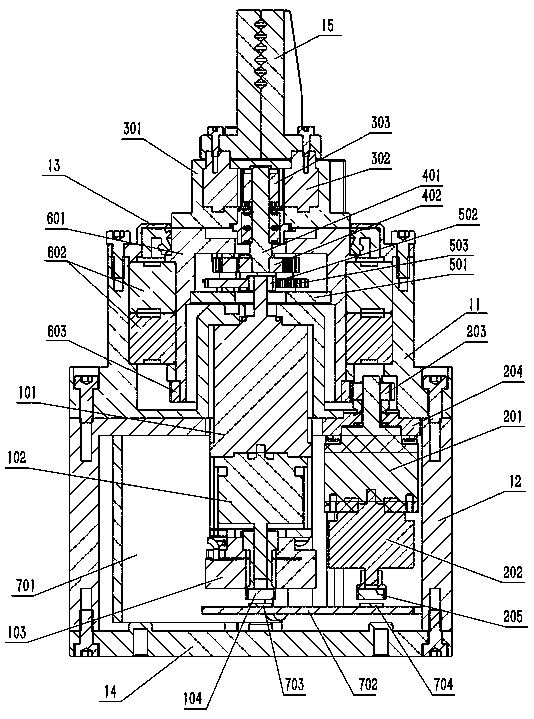
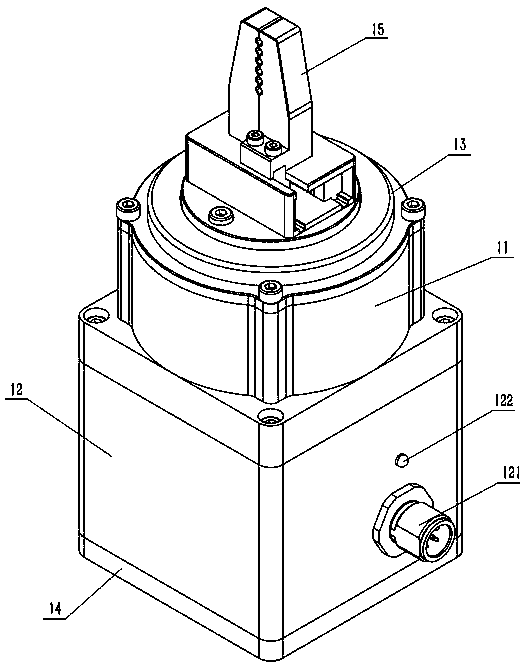
[0023] like Figure 1-3 As shown, a kind of intelligent manipulator with rotating and gripping function, comprises the rear cover 14, lower case 12, upper case 11, upper cover 13 and finger piece 15 that are connected successively from bottom to top, and described back cover 14. The lower housing 12, the upper housing 11, and the upper cover 13 form a space cavity. The upper housing 11 is connected with a conversion device, which passes through the upper cover 13 and is fixedly connected with the finger piece 15. The conversion device A cylindrical rotating frame 601 is arranged below, and the conversion device is connected with a rotating shaft 401. The lower shaft end of the rotating shaft 401 is provided with a shaft end gear 402, and the shaft end gear 402 is connected with a gear assembly structure. A first reducer 101 is connected, a first motor 102 is provided under the first reducer 101, a brake 103 is provided below the first motor 102, and a large gear 603 is fixedly...
Embodiment 2
[0037] An intelligent manipulator with rotation and clamping functions differs from Embodiment 1 in that a physical limit structure that cooperates with each other is provided at the corresponding positions of the upper housing 11 and the rack guide groove 301, or the upper The corresponding positions of the housing 11 and the cylindrical rotating frame 601 are provided with a physical limiting structure that cooperates with each other to realize the rotation limiting of the cylindrical rotating frame 601. The angle of the physical limiting structure can be from 0° to 360° to complete the positioning The limit function of any rotation angle position.
[0038] Preferably, the physical limit structure can adopt stoppers that cooperate with each other to achieve precise rotation limit.
[0039]The working principle of the intelligent manipulator with rotation and gripping functions of the present invention:
[0040] 1. Clamping movement:
[0041] 1) The first motor 102 is drive...
PUM
 Login to view more
Login to view more Abstract
Description
Claims
Application Information
 Login to view more
Login to view more - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap