

GNSS dynamic Kalman filtering method in cluster autonomous cooperation
A Kalman filtering and dynamic technology, applied in radio wave measurement systems, satellite radio beacon positioning systems, measurement devices, etc., can solve problems such as difficulty in ensuring the accuracy of double-difference observations, disappearance, and signal strength changes
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
[0085] In order to deepen understanding of the present invention, the present invention will be described in further detail below in conjunction with examples, and present examples are only used to explain the present invention, and do not constitute the limitation to protection scope of the present invention.
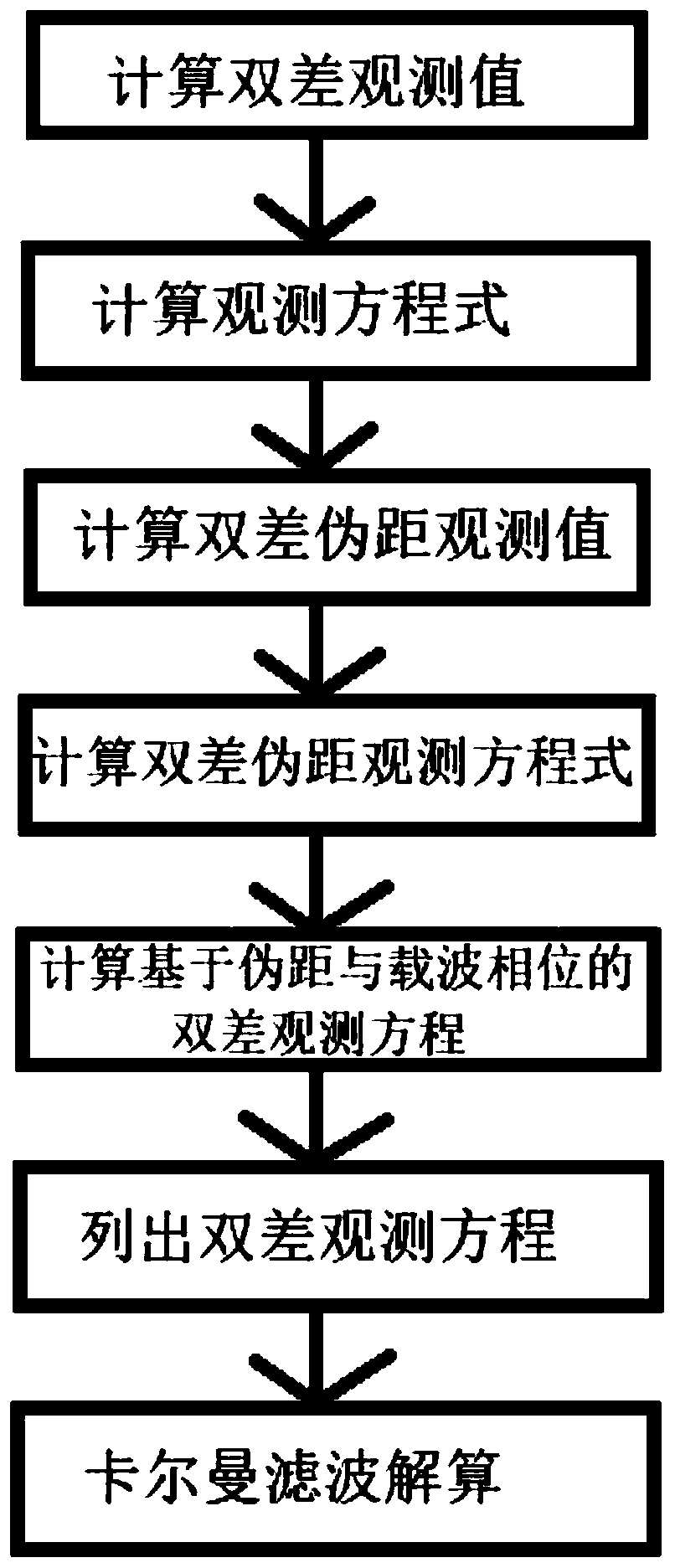
[0086] according to figure 1 As shown, the present embodiment provides a kind of GNSS dynamic Kalman filter method in cluster autonomous cooperation, comprising the following steps:
[0087] Step 1: Calculate the double-differenced observations
[0088] In the process of receiving satellite signals by multi-antenna receivers, each double-difference observation involves the measurement values of two satellites at the same time by two receivers, and it makes a difference between the single differences of two different satellites, that is, in Calculate the difference between stations and between satellites, assuming that the user receiver u and the reference station re...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More