

Path finding method based on A star optimization algorithm
An optimization algorithm and node technology, applied in road network navigator, two-dimensional position/course control, vehicle position/route/altitude control and other directions, can solve problems such as increasing search time and computing memory, and reduce time and calculation. memory, the effect of reducing the time spent searching and computing memory
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0033] Embodiments of the present invention are described in detail below, examples of which are shown in the drawings, wherein the same or similar reference numerals designate the same or similar elements or elements having the same or similar functions throughout. The embodiments described below by referring to the figures are exemplary only for explaining the present invention and should not be construed as limiting the present invention.
[0034] Embodiments of the present invention will be described in detail below in conjunction with the accompanying drawings.
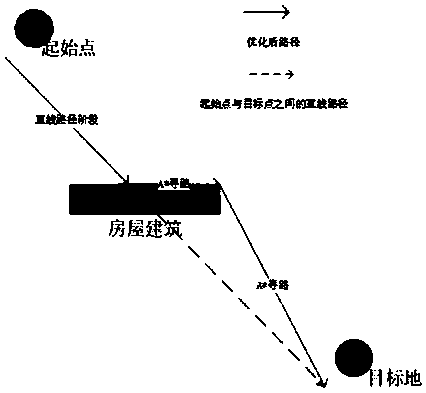
[0035] Unmanned vehicles need to plan a reasonable path when driving. The method of path planning is to plan a collision-free path from the initial state to the target position according to certain evaluation criteria in an environment with obstacles. The main consideration is Locally move the geometric relationship between the subject and the obstacle to find a collision-free path.
[0036] As a commonly used p...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More