

Redundant drive-based six-degree-of-freedom parallel robot
A technology of degrees of freedom and robots, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve problems such as poor controllability and uncontrollable degrees of freedom, achieve good stability, eliminate singularity, and improve smooth performance.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
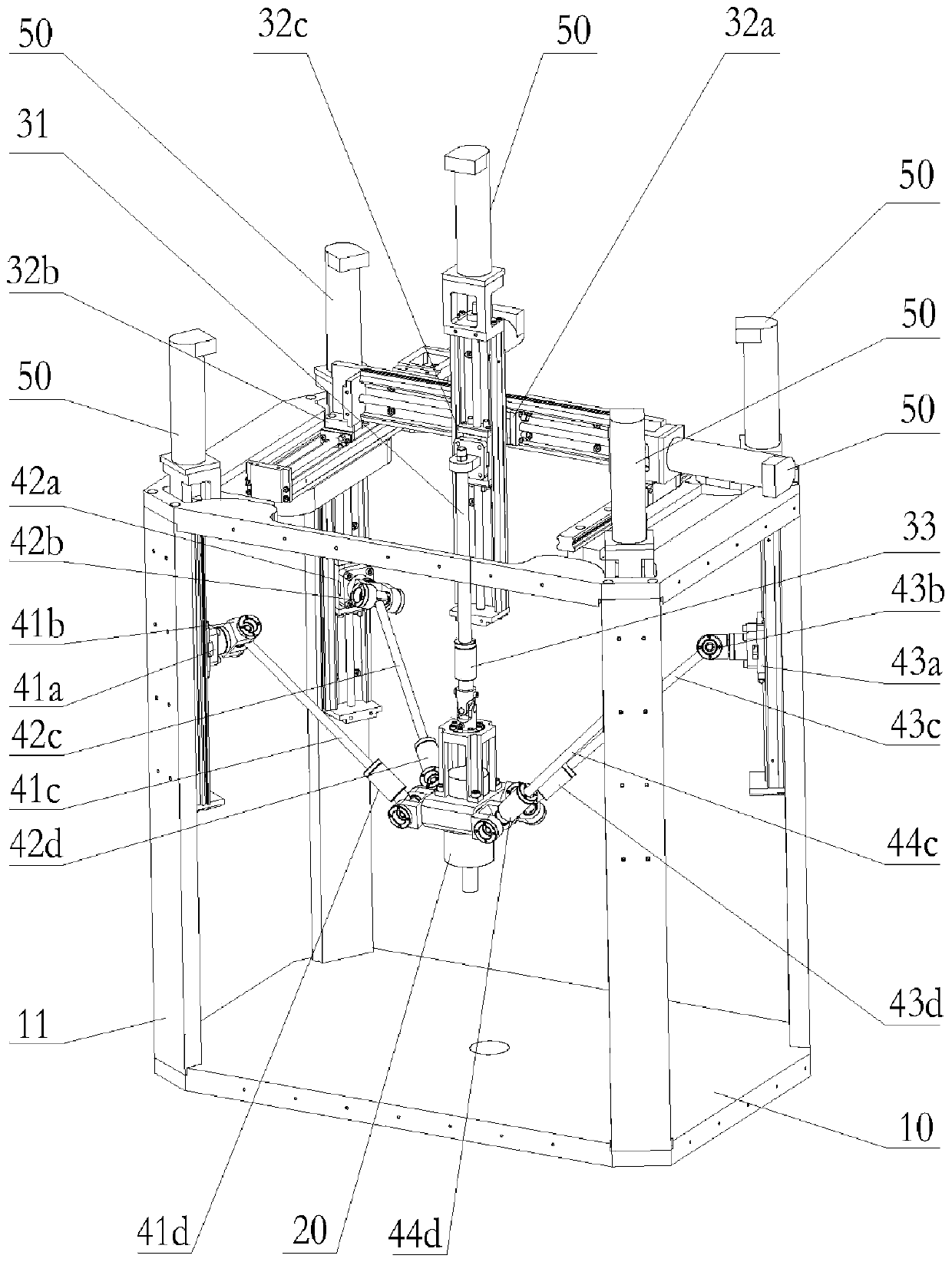
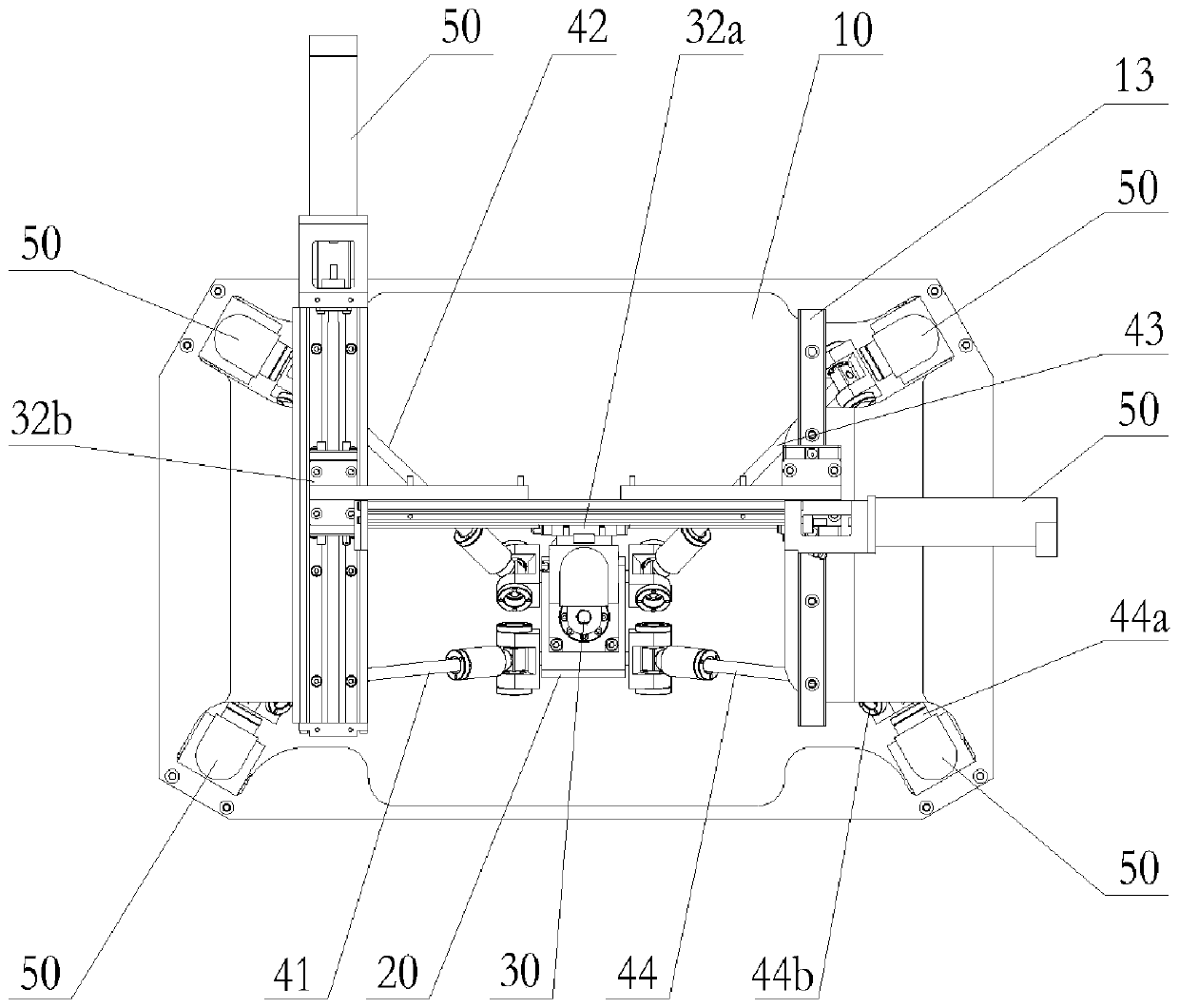
[0035] A six-degree-of-freedom parallel robot based on redundant drive, see figure 1 , figure 2, comprising a fixed frame 10, a movable platform 20, a central branch chain 30, a follow-up branch chain 40 and a drive unit 50, wherein the central branch chain 30 is connected between the movable platform 20 and the fixed frame 10, and four follow-up branch chains 40 It is connected between the movable platform 20 and the fixed frame 10, and the ends of the four follower branch chains 40 connected with the fixed frame 10 are distributed at the four corners of the rectangle.
[0036] The central branch chain 30 is a six-degree-of-freedom branch chain, including a central link 31, three moving pairs 32 located at one end of the central link 31, and a ball pair 33 located at the other end of the central link 31. The central branch chain 30 passes through the The three moving pairs 32 are connected to the fixed frame 10 , and the central branch chain 30 is connected to the movable p...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More