

Eccentricity ratio freezing common-rail double-pulse control intermediate rail determination method
A method of determining the middle orbit, which is applied in the direction of attitude control, etc., can solve the problems of short interval between double-pulse control, no observation data, waste of resources, etc., so as to improve the usable working arc of the orbit, strong operability, and reliability Good results
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
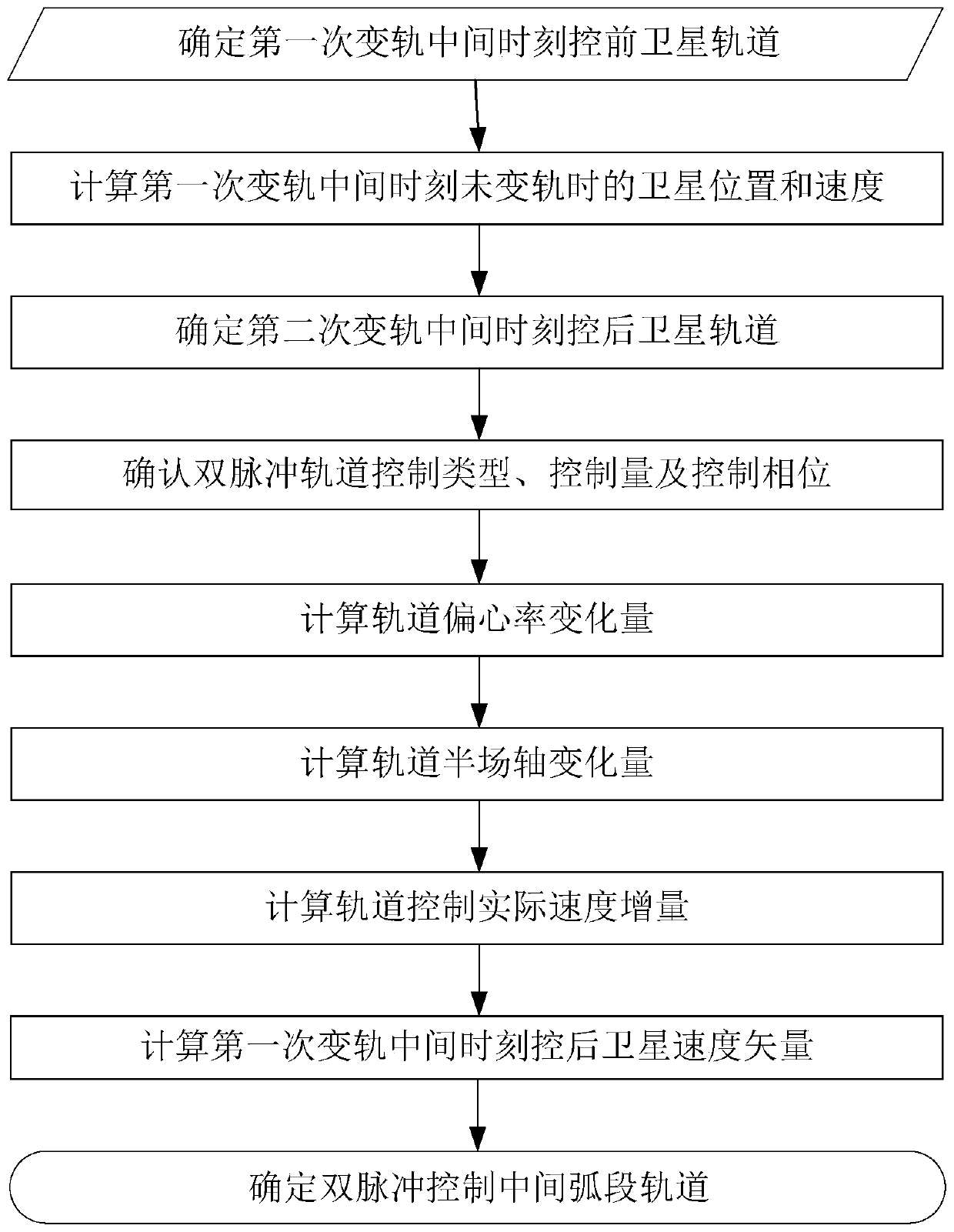
[0035] Embodiment 1, a method for determining the middle orbit of eccentricity freezing co-orbit dual pulse control, such as figure 1 As shown, the specific steps are as follows:
[0036] (1) Determine the satellite orbit at the middle moment of the first orbit change, and the parameters include the time t of the satellite orbit 0 , semi-major axis a 0 , eccentricity e 0 , inclination i 0 , right ascension of ascending node Ω 0 , the argument of perigee ω 0 , mean anomaly angle M 0 ;
[0037] (2) Calculate the satellite position vector in the J2000.0 coordinate system velocity vector and velocity magnitude V 0
[0038] where F 1 (t 0 ,a 0 ,e 0 , i o ,Ω 0 ,ω 0 , M 0 ) is according to the satellite orbit time t 0 , semi-major axis a 0 , eccentricity e 0 , inclination i 0 , right ascension of ascending node Ω 0 , Argument of perigee ω 0 , Mean anomaly angle M 0 Calculate satellite position vector and velocity vector The function;
[0039] (3) Det...
Embodiment 2
[0051] Embodiment 2, a method for determining the middle orbit of eccentricity freezing co-orbit dual pulse control, such as figure 1 As shown, the specific steps are as follows:
[0052] (1) Determine the satellite orbit at the middle moment of the first orbit change, and the parameters include the time t of the satellite orbit 0 , semi-major axis a 0 , eccentricity e 0 , inclination i 0 , right ascension of ascending node Ω 0 , the argument of perigee ω 0 , mean anomaly angle M 0 ;
[0053] (2) Calculate the satellite position vector in the J2000.0 coordinate system velocity vector and velocity magnitude V 0
[0054] where F 1 (t 0 ,a 0 ,e 0 ,i o ,Ω 0 ,ω 0 , M 0 ) is according to the satellite orbit time t 0 , semi-major axis a 0 , eccentricity e 0 , inclination i 0 , right ascension of ascending node Ω 0 , Argument of perigee ω 0 , Mean anomaly angle M 0 Calculate satellite position vector and velocity vector The function;
[0055] (3) Dete...
Embodiment 3
[0067] Embodiment 3, a method for determining the middle orbit of the eccentricity freezing co-orbit dual-pulse control, such as figure 1 As shown, the specific steps are as follows:
[0068] (1) Determine the satellite orbit at the middle moment of the first orbit change, and the parameters include the time t of the satellite orbit 0 , semi-major axis a 0 , eccentricity e 0 , inclination i 0 , right ascension of ascending node Ω 0 , the argument of perigee ω 0 , mean anomaly angle M 0 ;
[0069] (2) Calculate the satellite position vector in the J2000.0 coordinate system velocity vector and velocity magnitude V 0
[0070] where F 1 (t 0 ,a 0 ,e 0 ,i o ,Ω 0 ,ω 0 , M 0 ) is according to the satellite orbit time t 0 , semi-major axis a 0 , eccentricity e 0 , inclination i 0 , right ascension of ascending node Ω 0 , Argument of perigee ω 0 , Mean anomaly angle M 0 Calculate satellite position vector and velocity vector The function;
[0071] (3) ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More