Visual servo switching control method and system
A visual servo and control method technology, applied in the direction of program control manipulators, manufacturing tools, manipulators, etc., can solve the problems of poor system stability and anti-interference performance, inconvenient use, unstable saturation, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
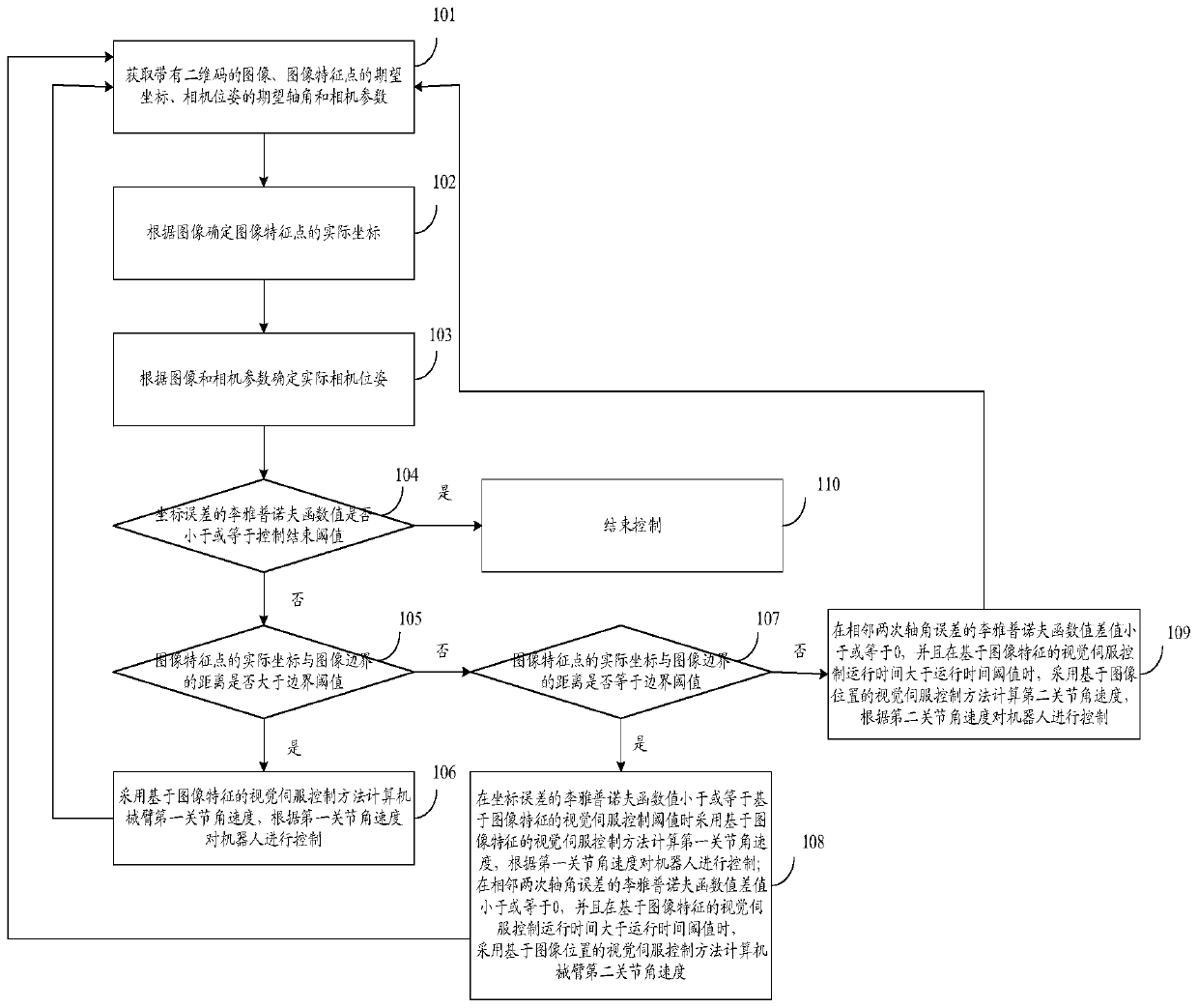
[0087] figure 1 It is a flow chart of the visual servo switching control method in the embodiment of the present invention, such as figure 1 As shown, a visual servo switching control method, including:
[0088] Step 101: Obtain an image with a two-dimensional code, expected coordinates of image feature points, expected axis angle of camera pose, and camera parameters. The image feature points are the corner points of the two-dimensional code.
[0089] Step 102: Determine the actual coordinates of the image feature points according to the image.
[0090] Step 103: Determine the actual camera pose according to the image and camera parameters.
[0091] Step 104: Judging whether the Lyapunov function value of the coordinate error is less than or equal to the control end threshold, and obtaining a first judging result. If the first judgment result is yes, execute step 110; if the first judgment result is no, execute step 105. The coordinate error is the error between the actu...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More