

Global-local hybrid unmanned ship path planning method based on dynamic constraints
A path planning, unmanned ship technology, applied in the direction of motor vehicles, non-electric variable control, two-dimensional position/channel control, etc., can solve the problem of not being able to generate quickly
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
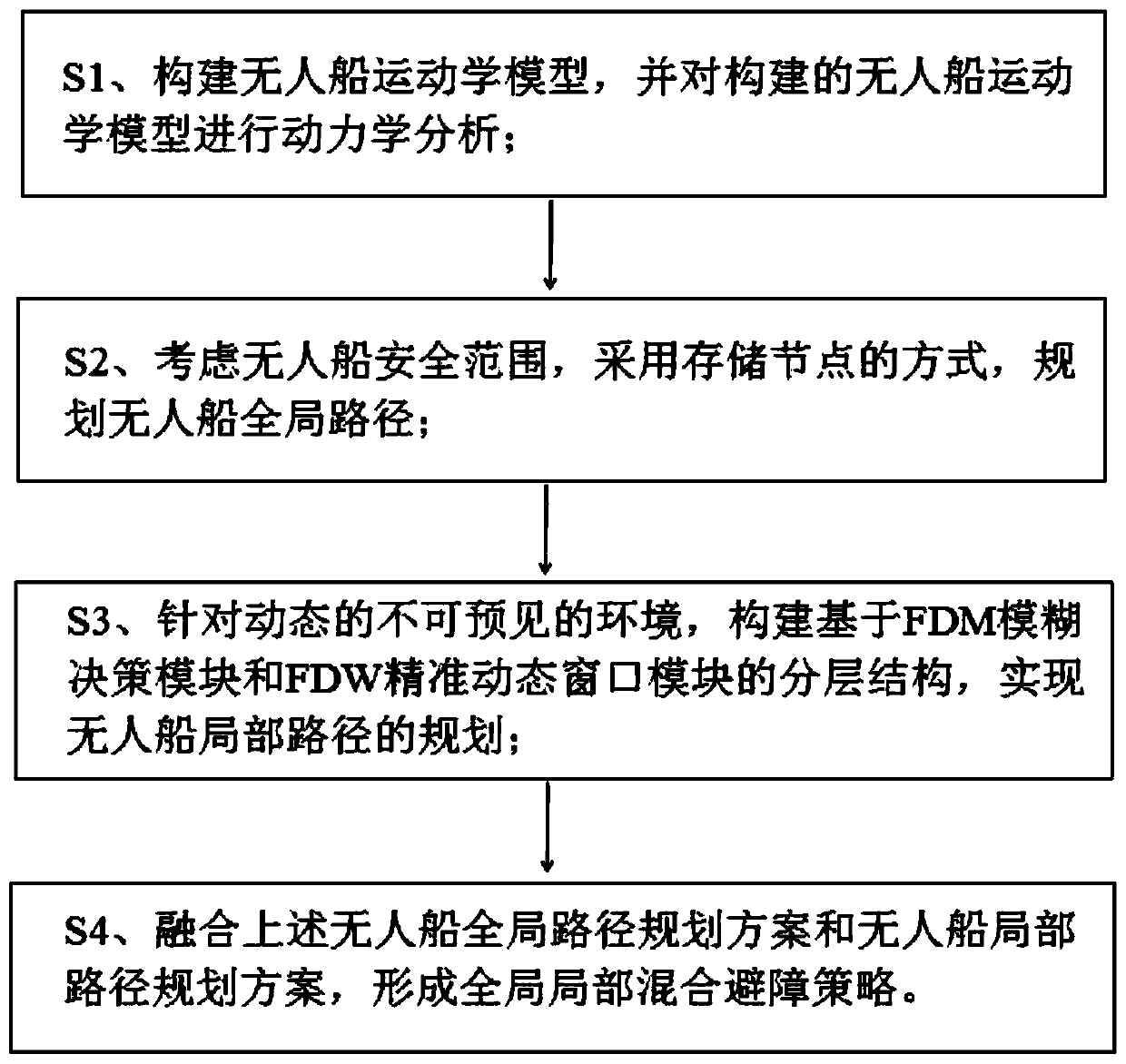
[0088] like figure 1 As shown, the present invention provides a global-local hybrid unmanned ship path planning method based on dynamic constraints, comprising the following steps:
[0089] S1. Construct the kinematics model of the unmanned ship, and perform dynamic analysis on the constructed kinematics model of the unmanned ship;
Embodiment approach
[0090] Further as a preferred embodiment of the present invention, the step S1 is specifically:
[0091] S11. Construct the kinematics model of the unmanned ship, the kinematics model of the unmanned ship is specifically as follows:
[0092]
[0093]
[0094]
[0095] Among them, (x, y, ψ) represent the position and heading of the unmanned ship in the earth coordinate system, and (u, v, r) represent the forward velocity, lateral velocity and heading angular velocity of the unmanned ship in the hull coordinate system, respectively;
[0096] S12. For the underactuated unmanned ship model, due to the limitation of forward and yaw dynamics, the lateral velocity v is bounded. Therefore, in the case of dynamic constraints, it is necessary to constrain the forward velocity and the yaw angular velocity, and the two The speed is limited by:
[0097]
[0098] in, is the restricted boundary; represents the forward acceleration, Indicates the yaw angular acceleration; ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More