

Parallel rehabilitation robot for lower limb training driven by redundant constraint flexible cable and control method of parallel rehabilitation robot
A rehabilitation robot and cable-driven technology, which is applied in the field of rehabilitation medical training equipment, can solve the problems of starting and stopping acceleration, large moment of inertia, complex design structure of exoskeleton robots, and secondary injuries of patients' lower limbs, so as to avoid secondary injuries. Less damage, less rotational inertia, and increased safety
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
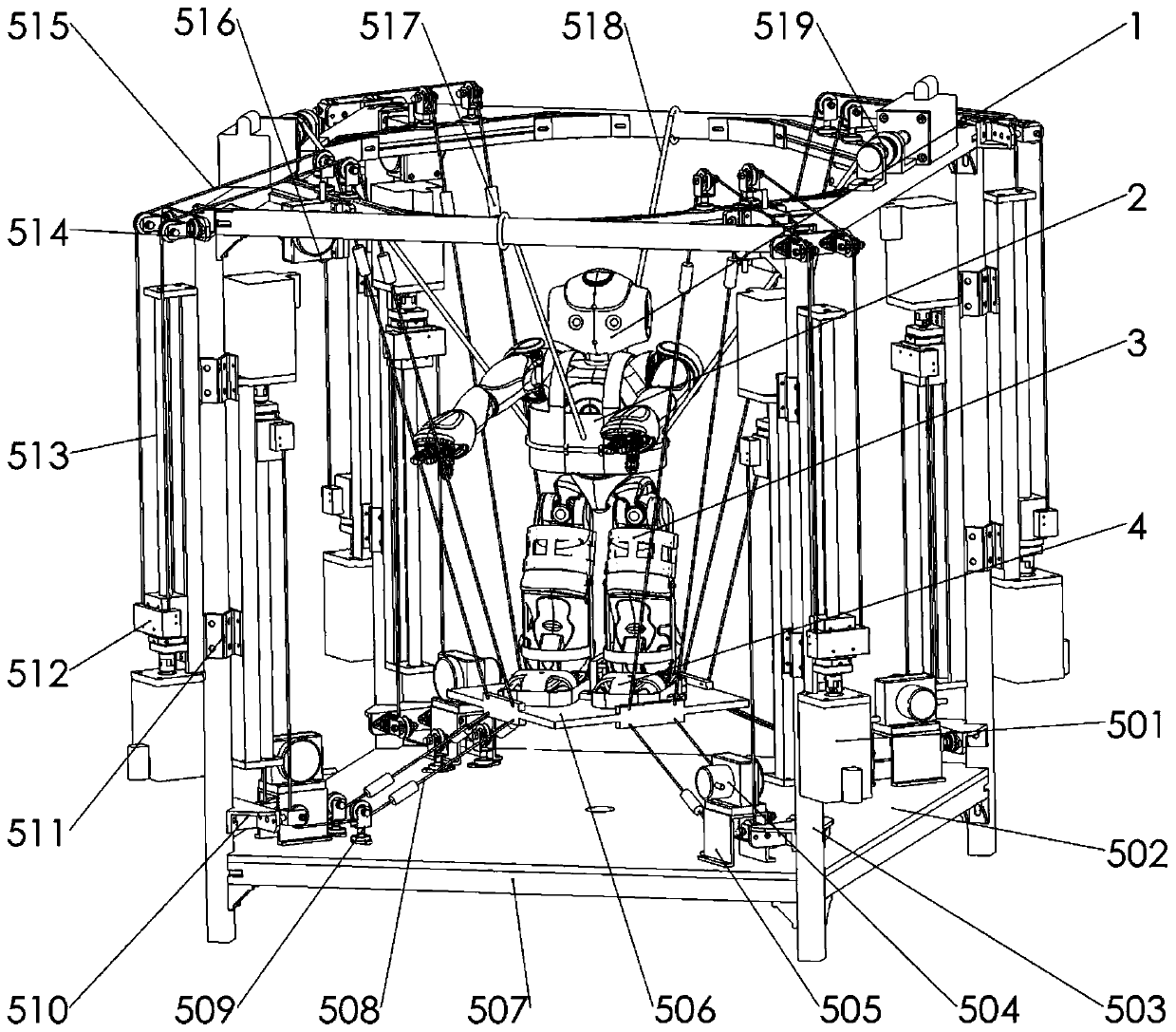
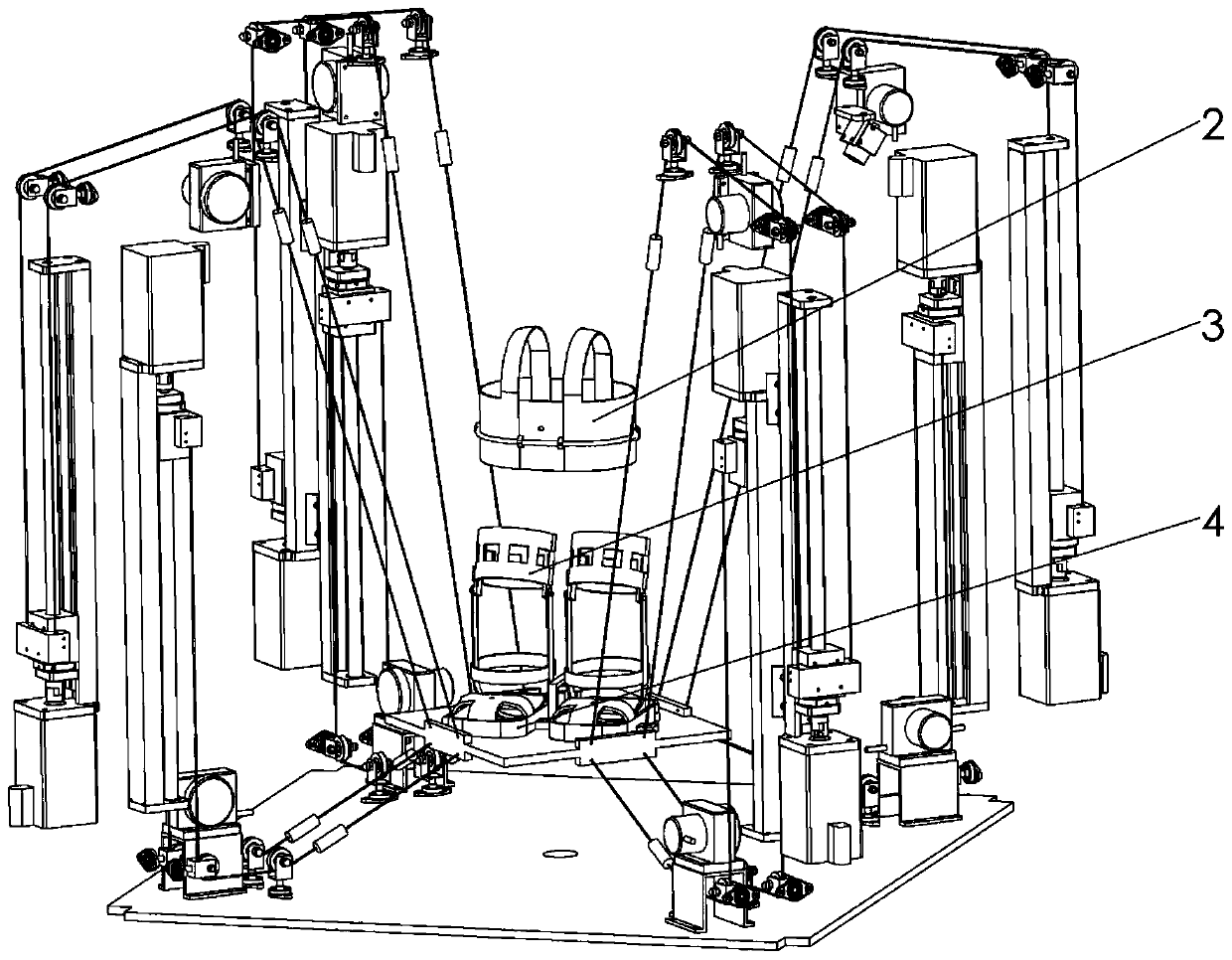
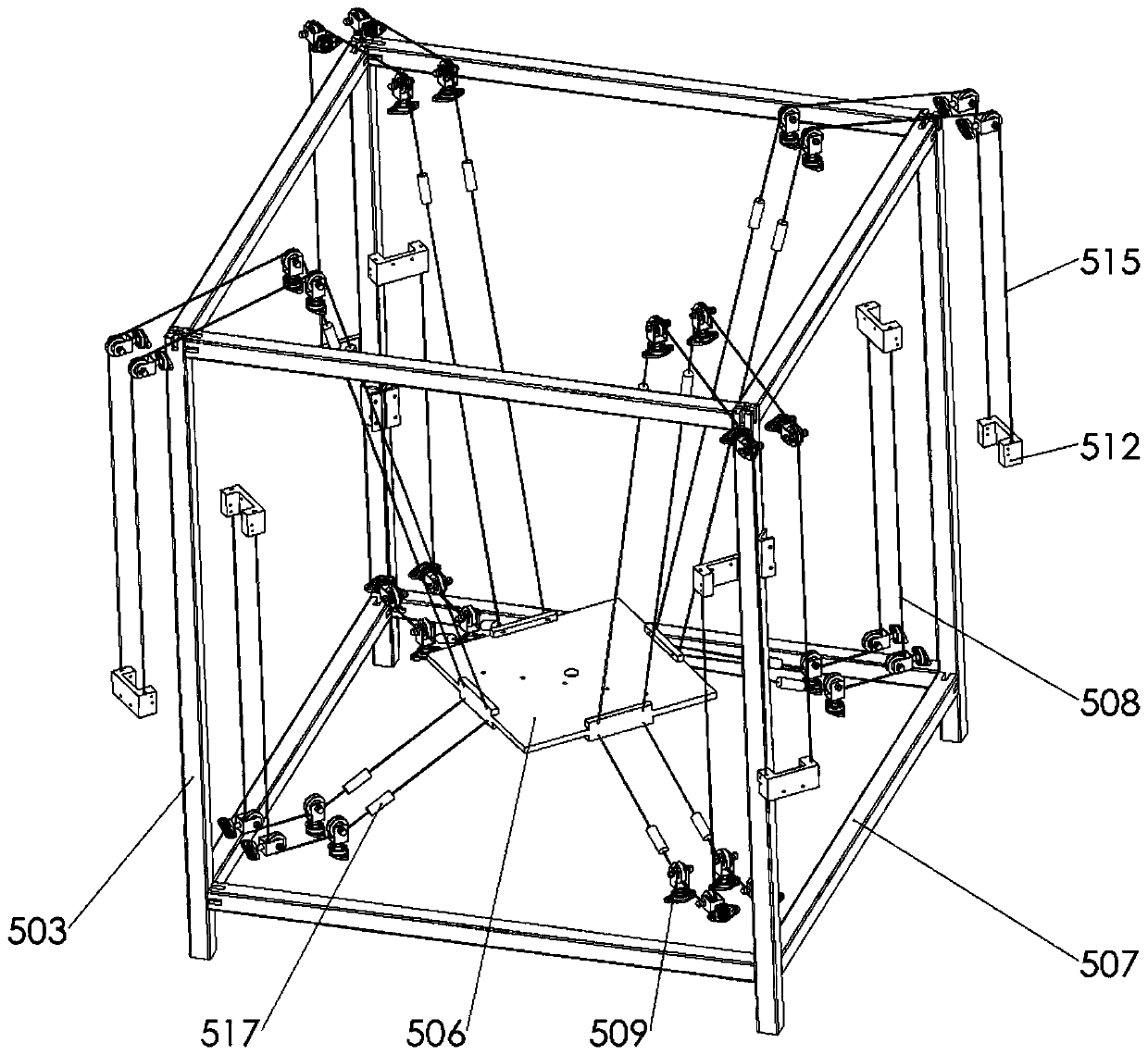
[0069] figure 1 and figure 2 The structural diagram of the parallel robot for lower limb training driven by flexible cables with redundant constraints, as shown in figure 1 As shown, the NAO humanoid robot 1 is located in the center of the outer frame, and the upper limb wearable adjustable fixing device 2 is connected to the top of the outer frame and the reel mechanism 519 on the top of the outer frame through the upper limb bearing cable 518, and is worn on the NAO humanoid robot. 1 above the waist. The leg current sensor 3 of the lower limb is worn on the leg of the NAO humanoid robot 1 . The foot fixing device 4 is worn on the feet of the NAO humanoid robot 1 and fixes the feet of the NAO humanoid robot 1 on the motion platform 506 . The ball screw pair 513 located outside the outer frame is connected to the upper end of the motion platform 506 through the upper drive cable 515 through the fixed pulley mechanism 509, and the ball screw pair 513 located inside the oute...
Embodiment 2
[0077] This example aims to realize the active sports training method, and the system structure is the same as that of Example 1
[0078] Refer to control flow Figure 15 , the control flow of this instance is as follows:
[0079] Steps 1 and 2 are the same as in the implementation example 1.
[0080] Step 3: Select the active exercise training method, the lower limb leg current sensor 3, the instep pressure sensor 403 and the sole pressure sensor 404, collect the movement direction trend of the human body, and send instructions from the host computer to drive the motor 501 to pull the flexible cable to drive the motion platform 506 Move according to the direction of human movement intention.
[0081] Steps 4 and 5 are the same as those in Example 1.
Embodiment 3
[0083] The goal of this example is to realize the combination of active exercise and passive exercise, and the system structure is the same as that of Example 1.
[0084] Refer to control flow Figure 15 , the control flow of this instance is as follows:
[0085] Steps 1 and 2 are the same as in Example 1.
[0086] Step 3: Choose a training method combining active exercise and passive exercise. The lower limb leg current sensor 3, the instep pressure sensor 403 and the sole pressure sensor 404 collect the movement direction trend of the human body, and the host computer issues instructions to drive the motor 1 501 to pull the flexible cable Drive the motion platform 506 to move according to the direction of the human body's movement intention, and at the same time, the host computer sends an instruction to drive the motor 1 501 to give an appropriate impedance.
[0087] Steps 4 and 5 are the same as those in Example 1.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More