

Portable cable flaw detection robot system
A robot system and portable technology, applied in radio wave measurement systems, instruments, manipulators, etc., can solve the problems of undiscovered cable fault detection applications, local temperature rise insensitivity, and large laying investment, so as to save manpower and material resources and ensure power supply Reliability and operation cost reduction effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0016] The portable cable flaw detection robot system provided by the present invention will be described in detail below in conjunction with the accompanying drawings and specific embodiments.
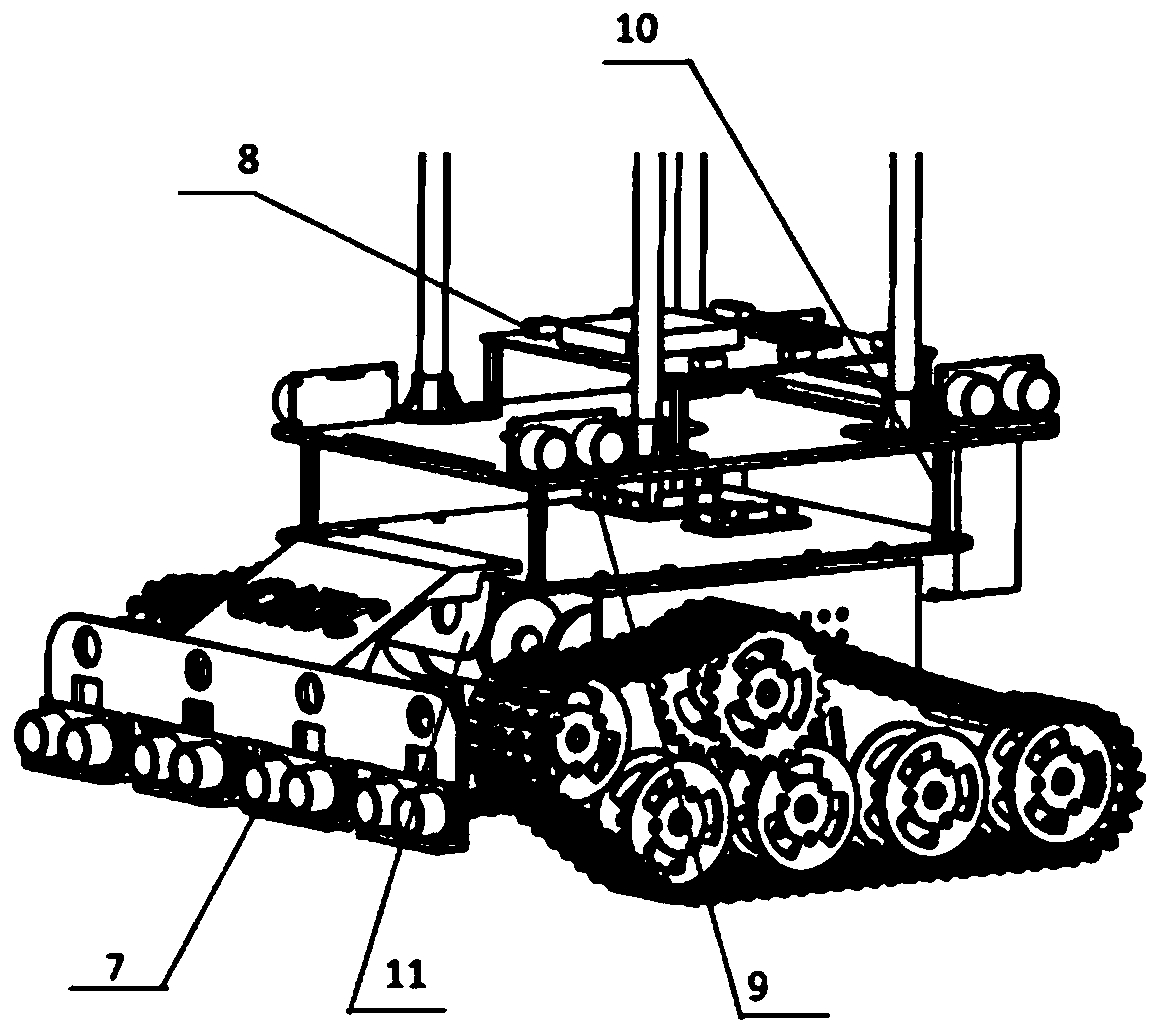
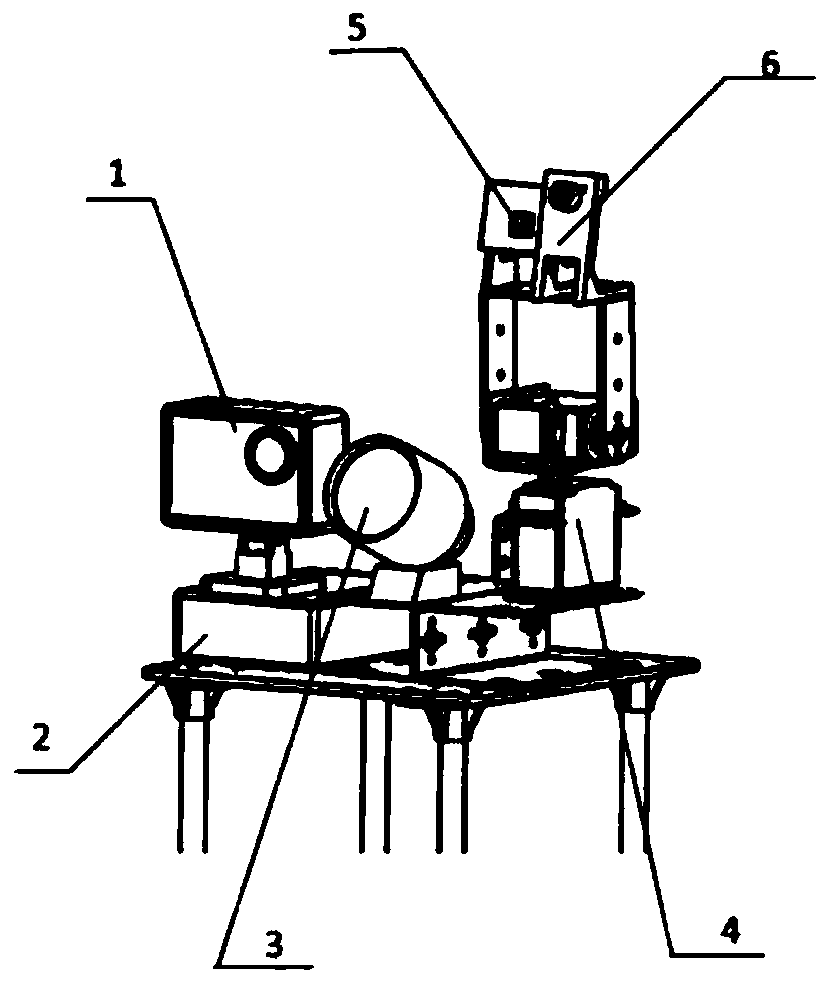
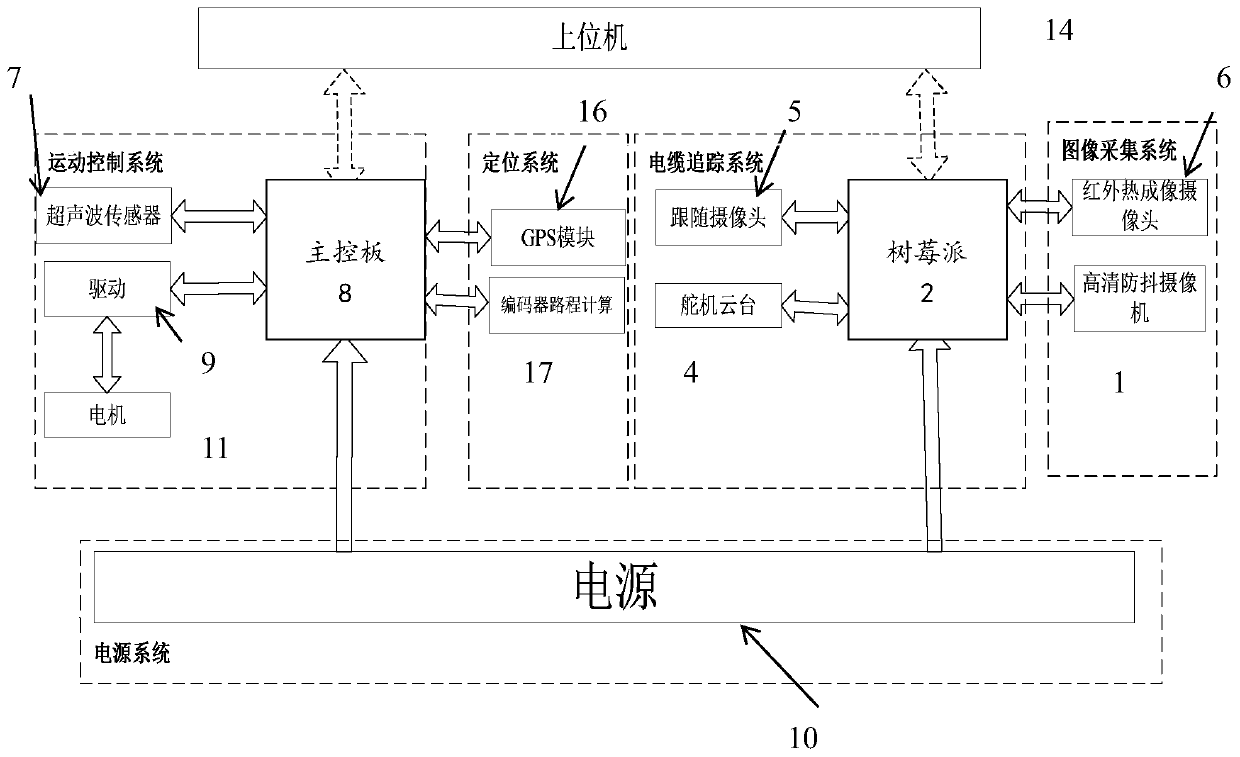
[0017] Such as Figure 1-Figure 3 As shown, the portable cable flaw detection robot system provided by the present invention includes a high-definition anti-shake camera 1, a raspberry pie 2, an LED light 3, a steering gear pan / tilt 4, a following camera 5, an infrared thermal imaging camera 6, an ultrasonic sensor 7, a main controller Plate 8, motor drive plate 9, power supply 10, motor 11, car body 12, support platform 13, GPS module 16 and distance calculation module 17; Wherein car body 12 adopts crawler structure; The lower end of support platform 13 is fixed on car body 12 edge of the top surface; HD anti-shake camera 1, raspberry pie 2, LED light 3 and steering gear pan / tilt 4 are installed on the top surface of support platform 13; following camera 5 and infrared thermal imagi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More