

Space capture manipulator driven by SMA (shape memory alloy) wires
A manipulator and space technology, applied in the direction of manipulators, program-controlled manipulators, chucks, etc., can solve the problems of slow cooling speed of SMA springs, reduced output force, reduced work efficiency and mechanical efficiency, etc., to reduce the possibility of gripper failure , avoid the effect of controlling the process and simple structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
[0045] The present invention will be described in detail below in conjunction with specific embodiments. The following examples will help those skilled in the art to further understand the present invention, but do not limit the present invention in any form. It should be noted that those skilled in the art can make several modifications and improvements without departing from the present concept. These all belong to the scope of protection of this book.
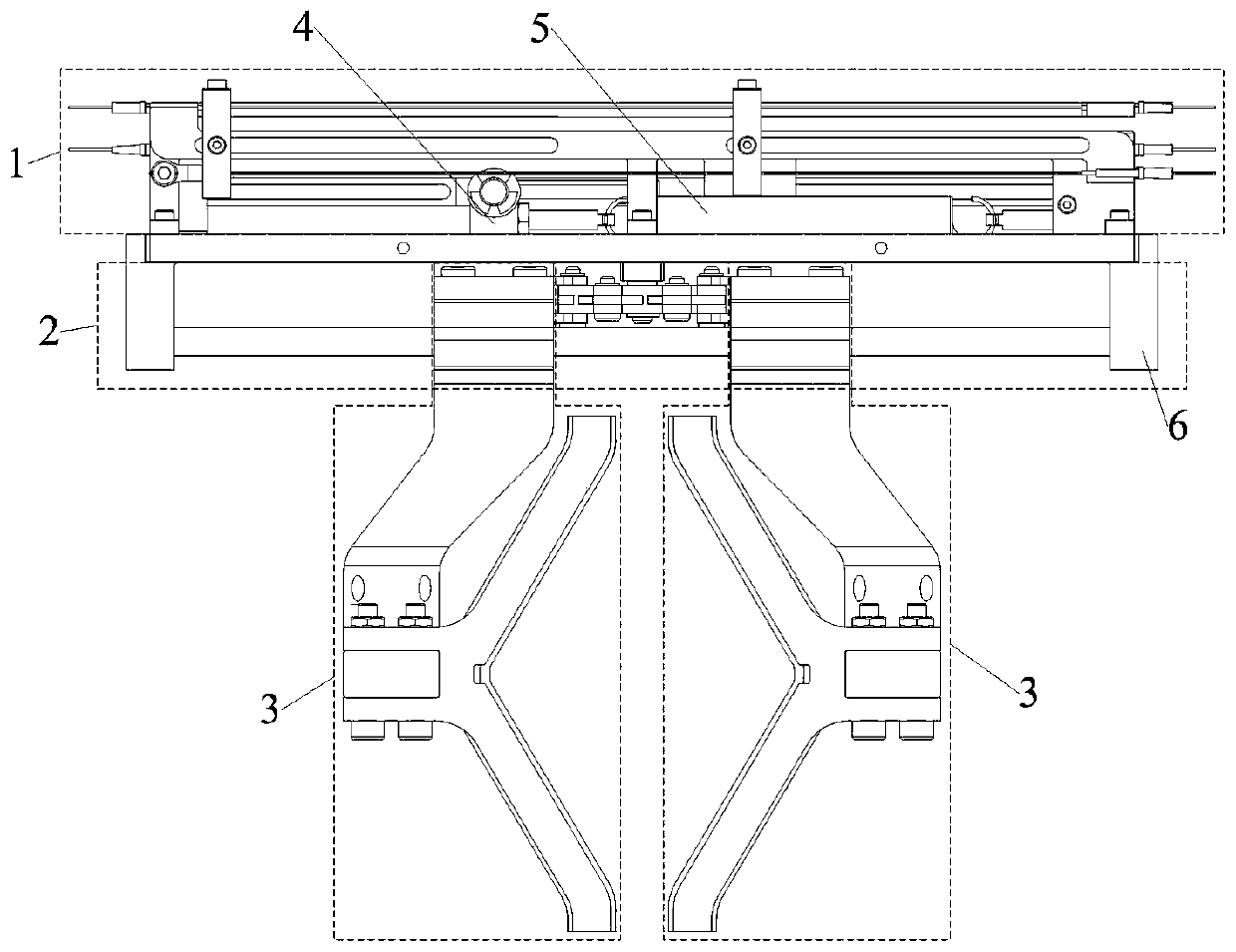
[0046] refer to Figure 1-Figure 12 As shown, a space capture manipulator based on SMA wire drive is provided. The space capture manipulator includes a frame 6, a driving part 1, a coupling transmission part 2 and a claw part 3,
[0047] The driving part 1 includes: a driver frame 1-1, a fixed end 1-2, a plurality of SMA wires 1-3, a plurality of slide bars, a slide bar holder 1-8, a A plurality of slider pins 1-9, drive rods 4, and bias springs 5, a driver rack 1-1 mounted on a frame 6, a slider holder 1-8 mounted on a d...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More