

Strong-robustness self-adaptive driving antiskid control method used for hub motor driven electric vehicle and capable of improving acceleration comfort
A hub motor and electric vehicle technology, applied in electric vehicles, control drive, power management, etc., can solve the problems that the controller does not have the ability to resist longitudinal vibration, the longitudinal movement of the vehicle, and the speed of the vehicle has a great influence on the stability of the controller.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment
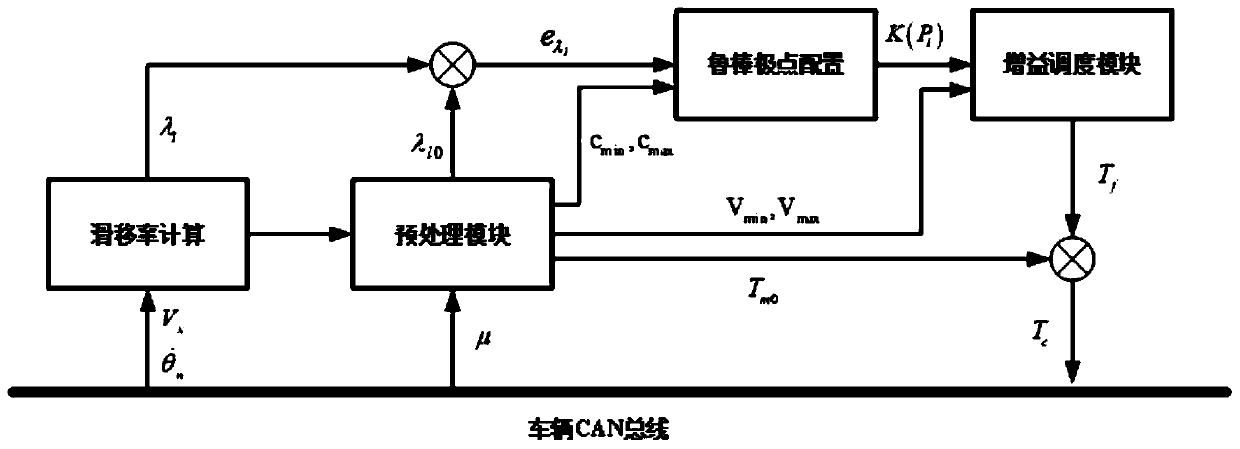
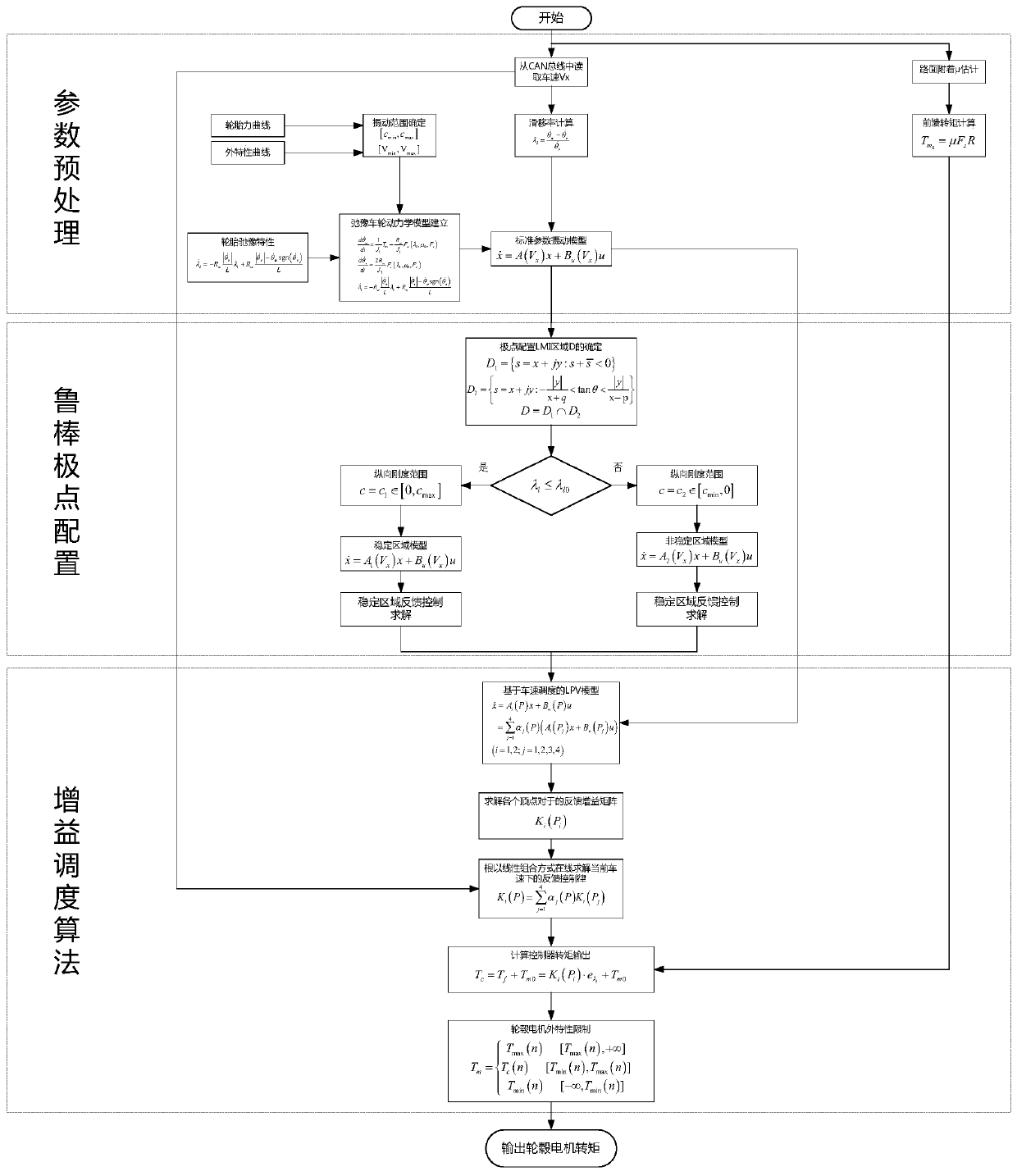
[0097] Based on the shortcomings of the existing technology, figure 2 As shown, the strong robust adaptive drive anti-slip control method for in-wheel motor driven electric vehicles provided by the present application to improve acceleration comfort includes the following steps, which are based on figure 1 The architecture shown is implemented:
[0098] The first step: information preprocessing, including wheel speed sensor signal, vehicle speed information, wheel transient slip rate, real-time road surface adhesion coefficient, optimal slip rate and hub motor reference torque, to determine the perturbation of longitudinal stiffness range, the speed range where the peak torque occurs, and the speed range where slippage is likely to occur;
[0099] Among them, the wheel speed sensor signal Obtained from the CAN bus of the vehicle, the vehicle speed information V x Obtained by the inertial measurement unit, the real-time road adhesion coefficient μ is obtained by the road a...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More