Integrated soft glove system for medical rehabilitation
A soft glove, integrated system technology, applied in physical therapy, passive exercise equipment, etc., can solve the problems of poor finger wearing effect, poor bending effect, poor control effect, etc., to achieve good control effect and bending effect, finger wear Convenient, compact effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0023] The specific implementation manner of the present invention will be described below in conjunction with the accompanying drawings.
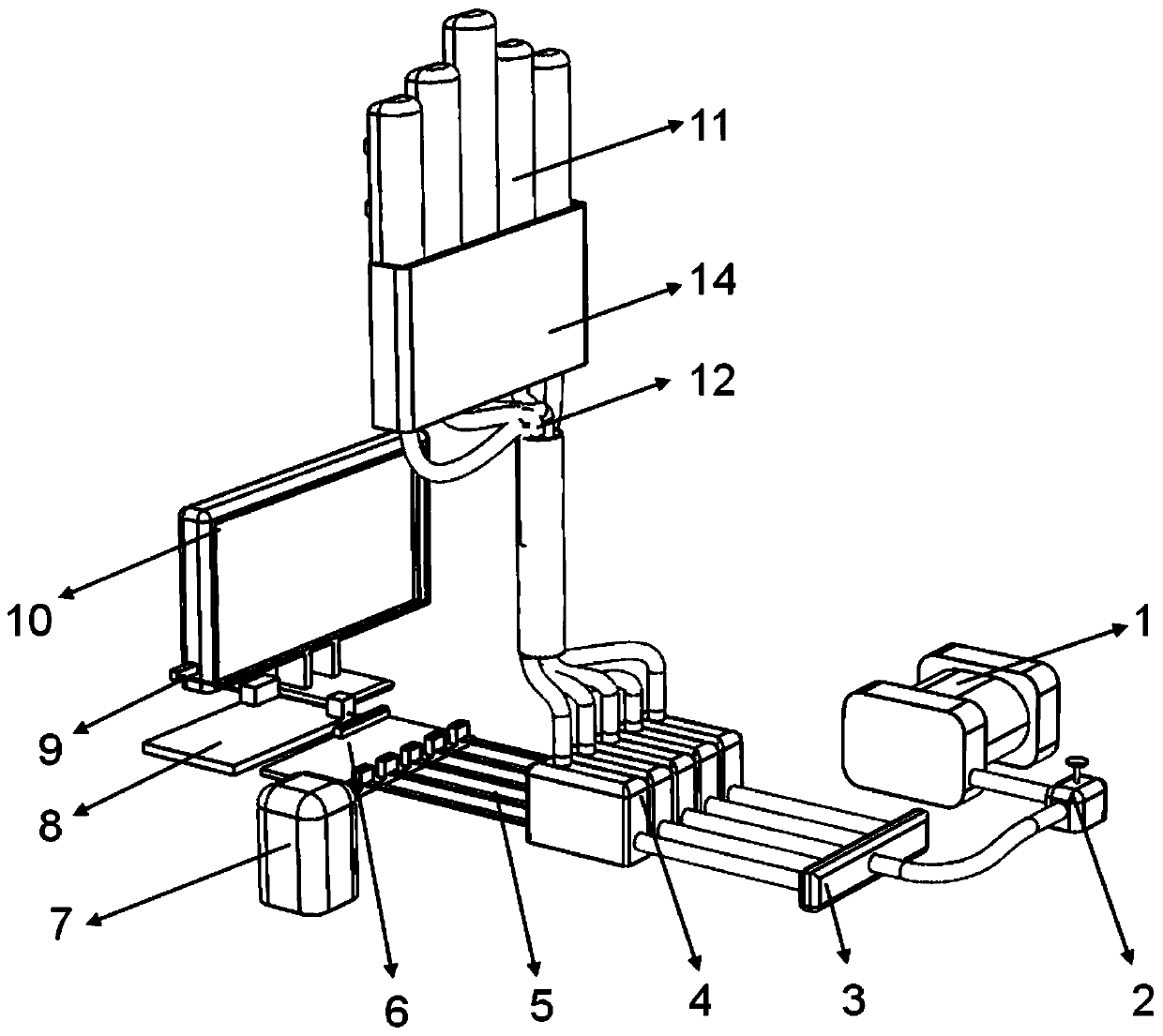
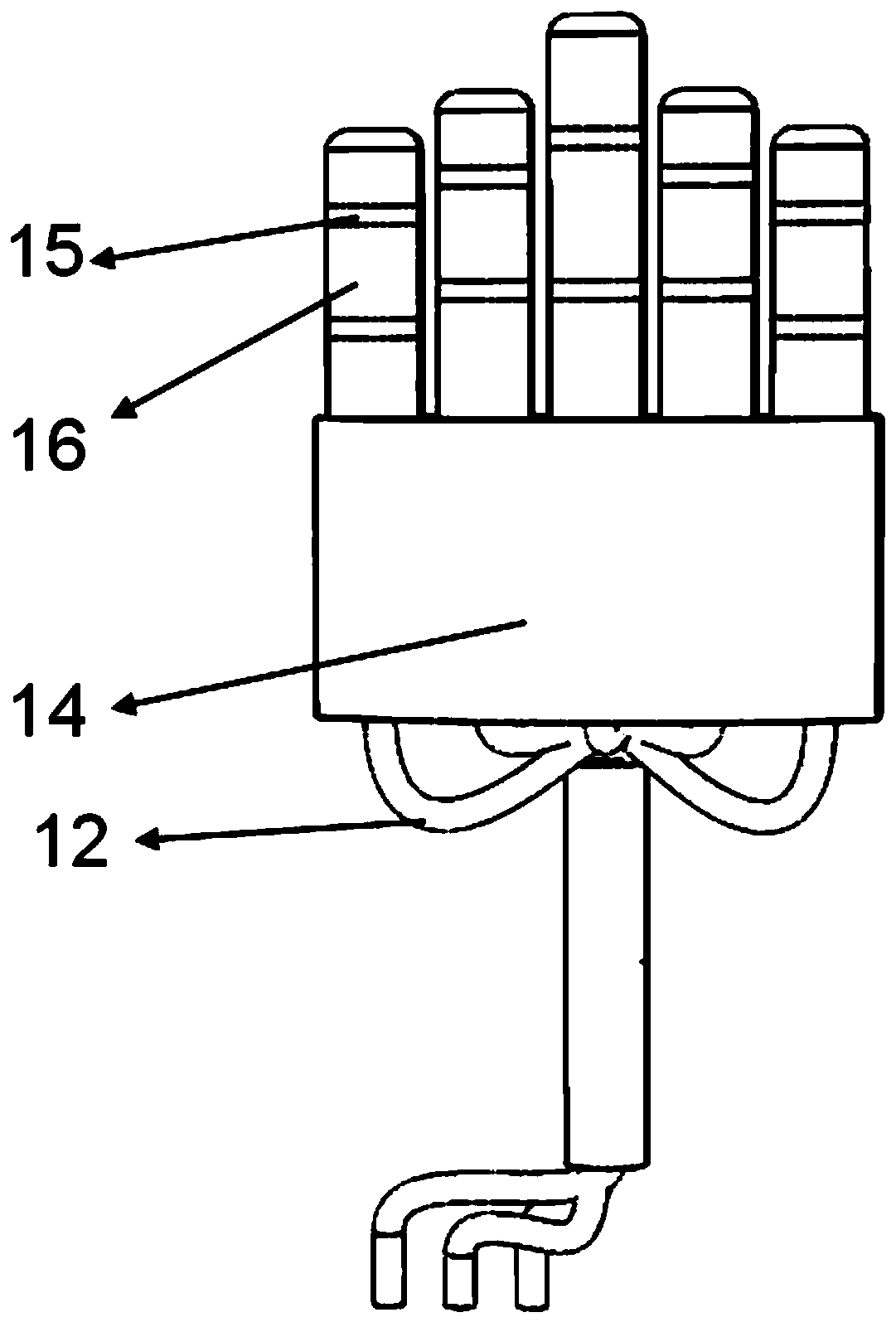
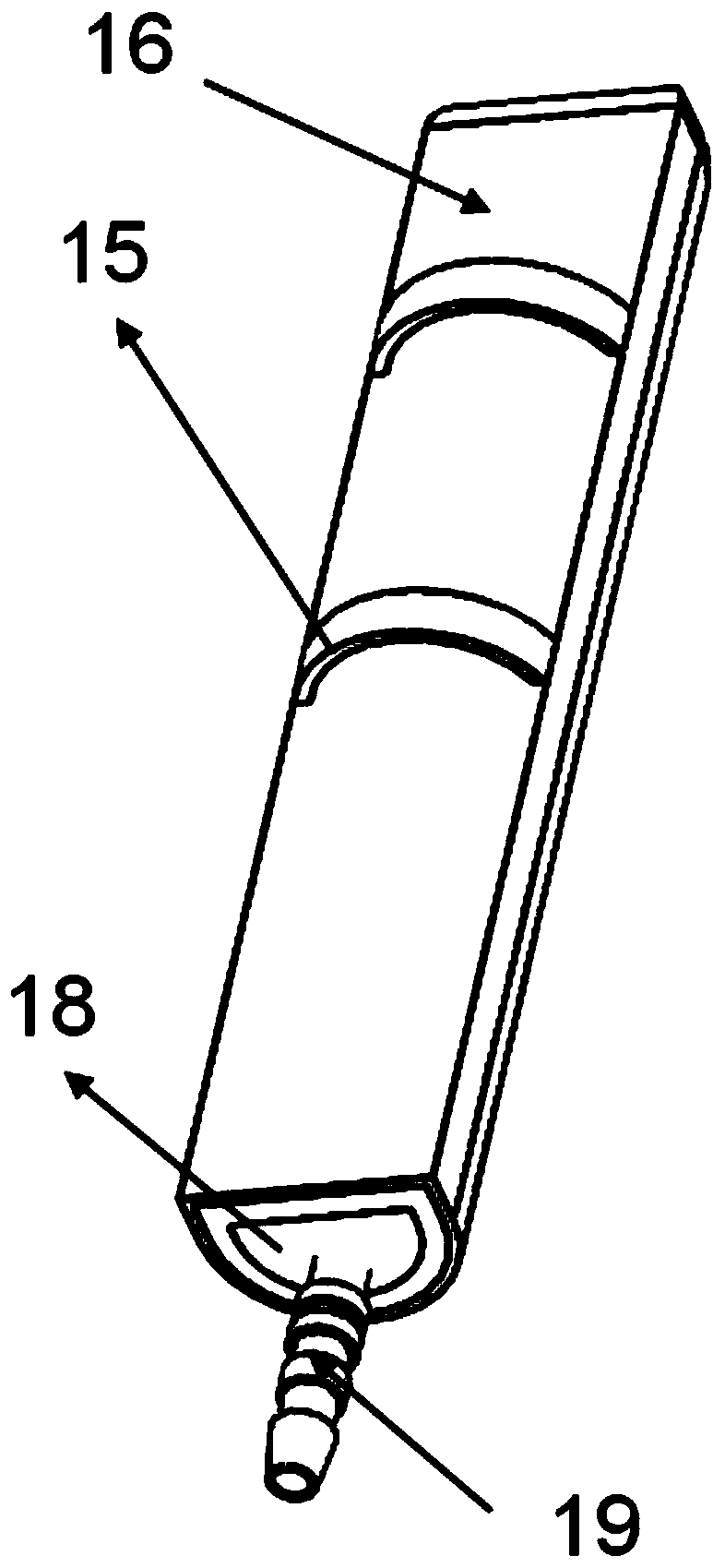
[0024] Such as Figure 1-Figure 3 As shown, the integrated soft glove system for medical rehabilitation in this embodiment includes a soft glove body 11 and an integrated system for controlling the bending of the soft glove body 11; the structure of the soft glove body 11 is: including five flexible finger covers 16 , the flexible finger cot 16 is a finger-shaped shell structure, and a soft driver is nested inside it. The structure of the soft driver includes an outer limiting layer 17 of imitation fishbone structure and a flexible generator embedded in the outer limiting layer 17 of imitation fishbone structure. Elastically deformable hollow core 18 with a closed cavity;
[0025] A flexible clasp 15 is installed on each flexible finger cover 16; the bottoms of five flexible finger covers 16 are fixed into one body by a strap 14; The hol...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com