

An obstacle detection method for unmanned mining trucks
A technology of obstacle detection and obstacle, which is applied in the direction of radio wave measurement system, measurement device, radio wave reflection/reradiation, etc., can solve the problem of poor robustness and unmanned mine card obstacle detection applicable scene ability Strong and other issues, to achieve good robustness, prevent missed detection, and good robustness
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0028] The present invention will be further described below in conjunction with the accompanying drawings. The following examples are only used to illustrate the technical solution of the present invention more clearly, but not to limit the protection scope of the present invention.
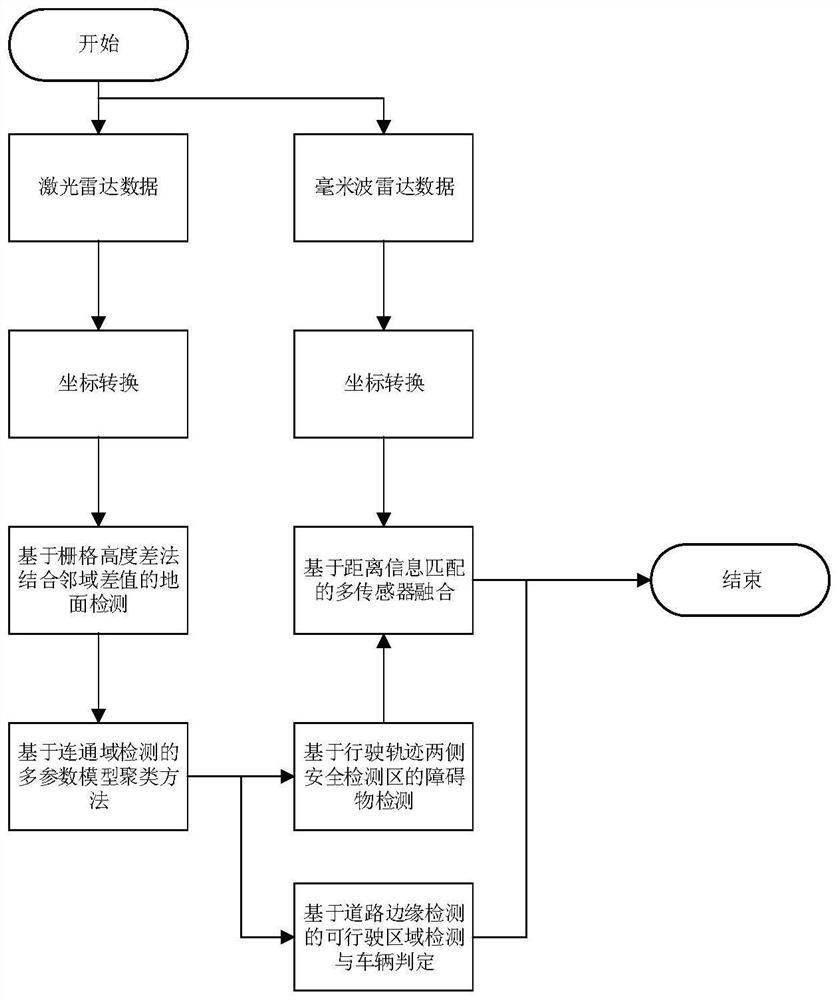
[0029] This embodiment discloses an unmanned mining truck obstacle detection method, refer to figure 1 , the specific steps are as follows:
[0030] The obstacle data acquired by laser radar and millimeter wave radar are respectively converted into the corresponding vehicle body coordinate system. Since there are many kinds of lidars, and there may be more than one of each, multi-sensor data fusion is required.
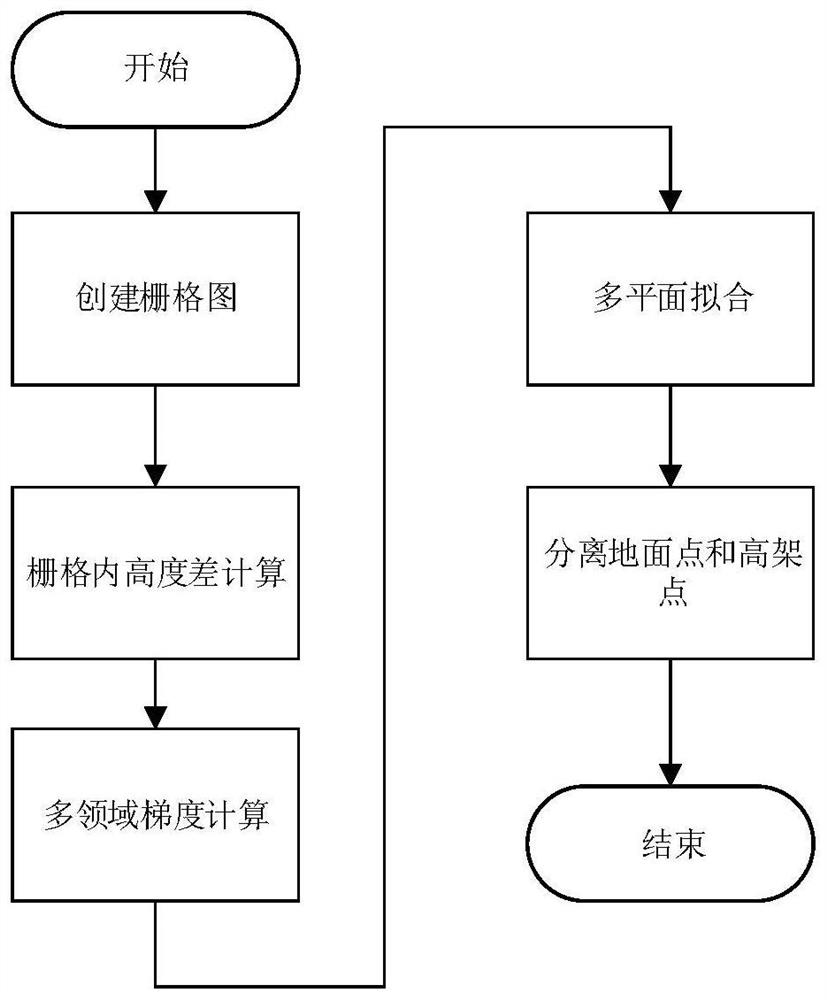
[0031] The detection of ground data uses multiple planes to fit the road surface, and combines the height difference of the grid map with the neighborhood difference detection. Traditional lidar processing solutions need to separate ground points and elevated points. On structured r...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More