

Robot welt motion control system and method
A motion control system and motion control technology, applied in control/regulation systems, non-electric variable control, two-dimensional position/channel control, etc., can solve problems such as poor mapping effect, high risk of infection, and high participation. To achieve the effects of making up for weak robustness, strong adaptability, and reducing manual intervention
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0080] It should be noted that, in the case of no conflict, the embodiments in the present application and the features in the embodiments can be combined with each other. The present invention will be described in detail below with reference to the accompanying drawings and examples.
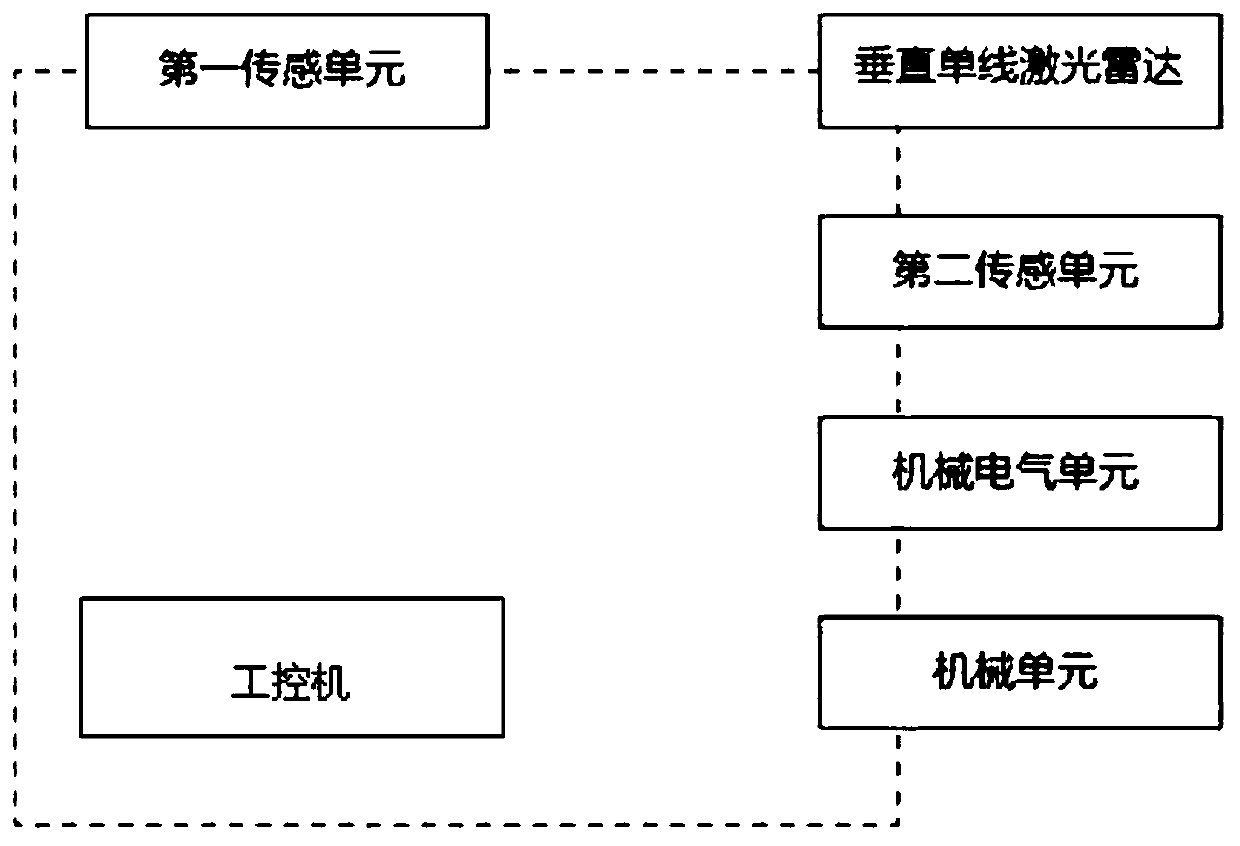
[0081] refer to figure 1 , a preferred embodiment of the present invention provides a robot welt motion control system, comprising:
[0082] The first sensing unit is used to horizontally collect the point cloud data in front of the robot and the distance value of the wall or the nearest obstacle;
[0083] The second sensing unit is used to collect the distance value of the wall on the right side of the robot or the nearest obstacle;
[0084] The third sensing unit is used to vertically collect point cloud data at 45° from the right front of the robot and the distance value of the nearest obstacle;
[0085] The industrial computer is used to send control instructions according to the point c...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More