

Four-degree-of-freedom multi-eye visual rotary flight type picking robot and picking method thereof
A picking robot and multi-eye vision technology, which is applied to the multi-eye vision spinning flying picking robot and its picking field, can solve the problems of danger, difficulty in picking fruit trees in mountainous areas, small body, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
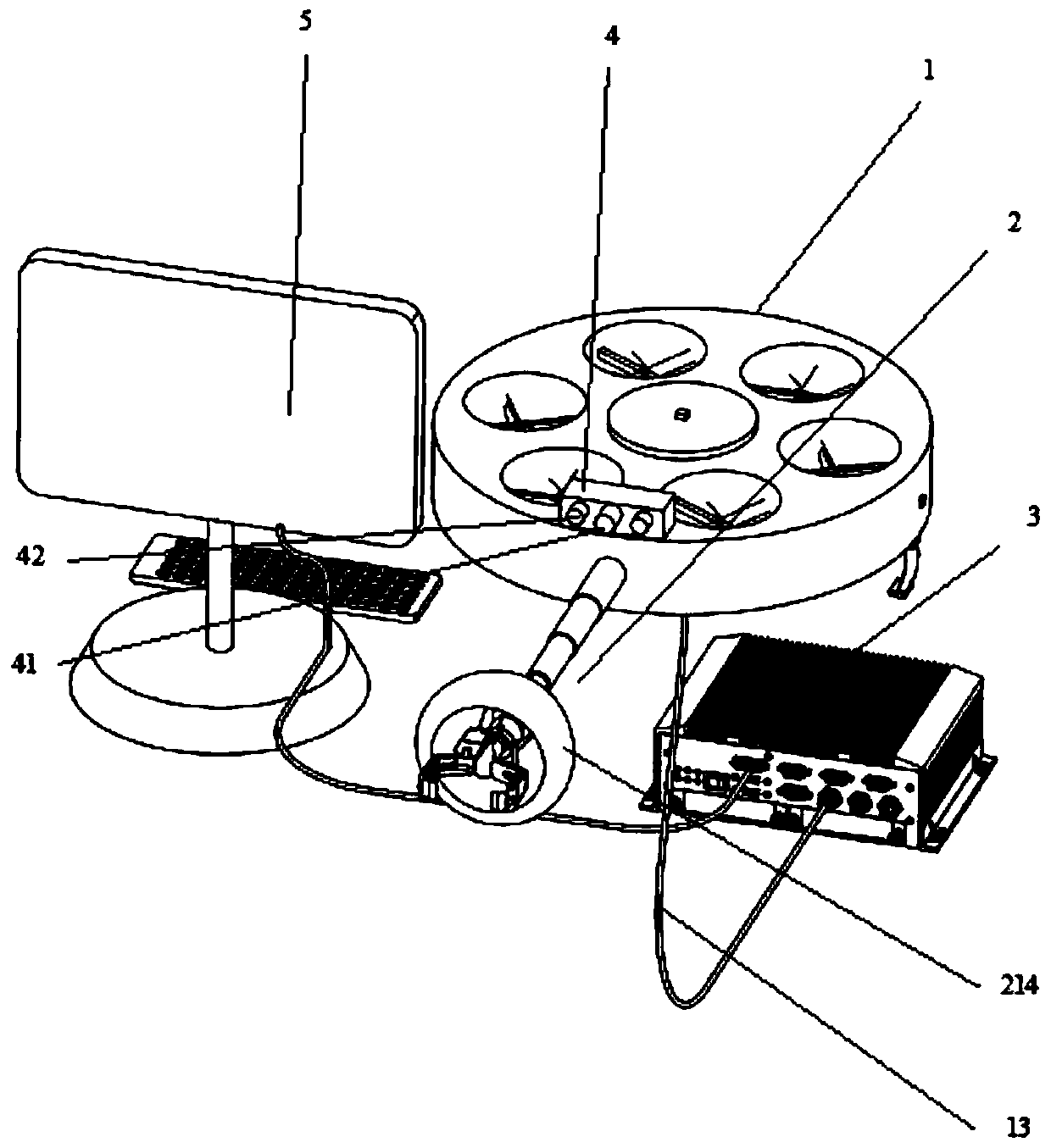
[0073] A four-degree-of-freedom multi-eye vision flying picking robot, such as figure 1 As shown, it includes unmanned aerial vehicle 1, picking mechanism 2 and multi-eye vision device 4; said picking mechanism 2 and multi-eye vision device 4 are installed on the unmanned aerial vehicle 1; Machine 3 and computer 5 are connected together for data transmission and system control.
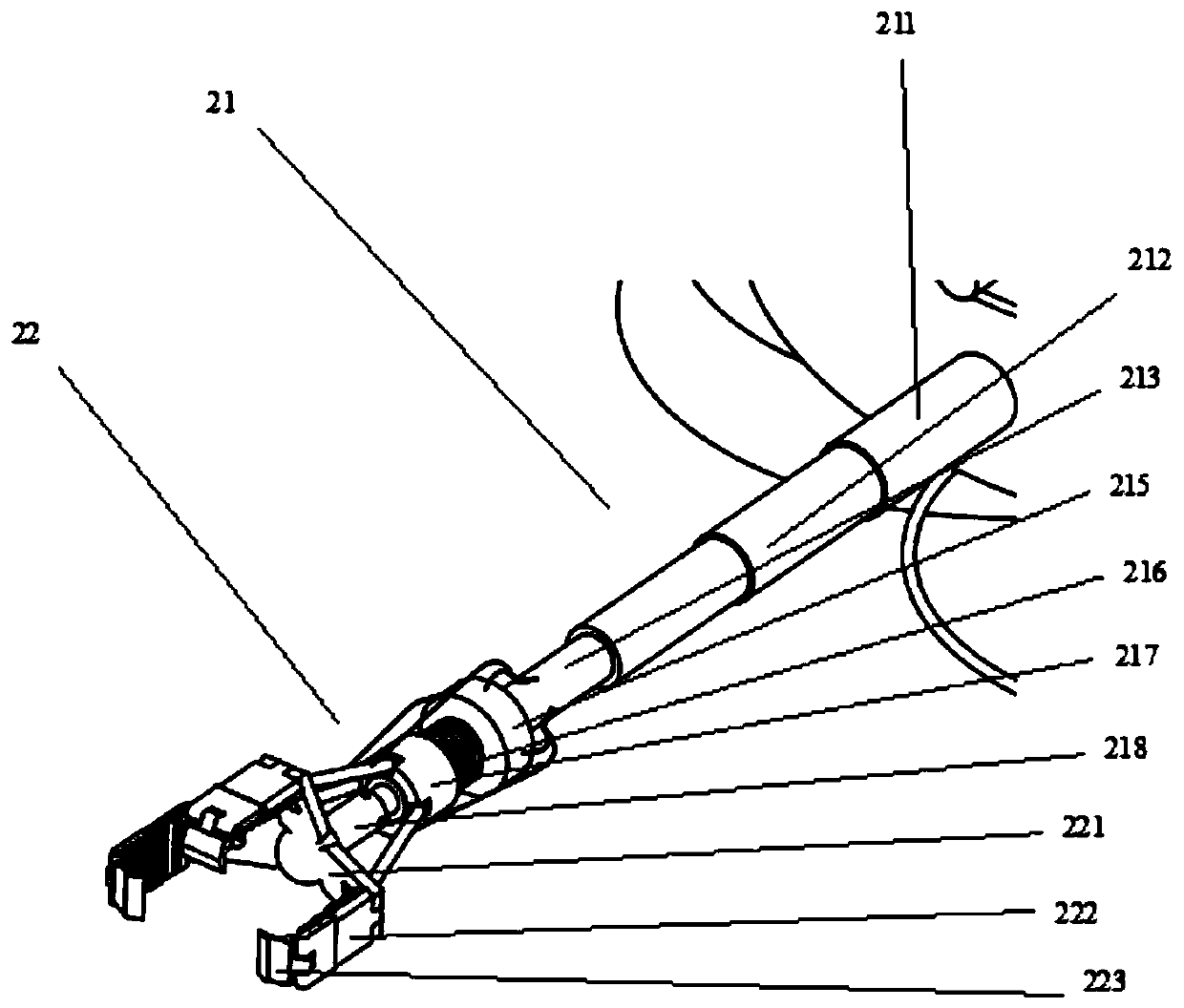
[0074] Described picking mechanism 2 comprises telescoping rod 21, picking manipulator 22, as figure 2 shown. The telescopic rod 21 has at least three sections, including the first section 211, the middle section 212 and the last section 213, wherein the middle section is more than one section, and the first section, the middle section and the last section are nested in a stepped manner; The front end of the first pole is installed in the body of the drone, and the end of the last pole is equipped with a picking manipulator. Except that the last pole is not telescopic, other poles can be telescopi...
Embodiment 2
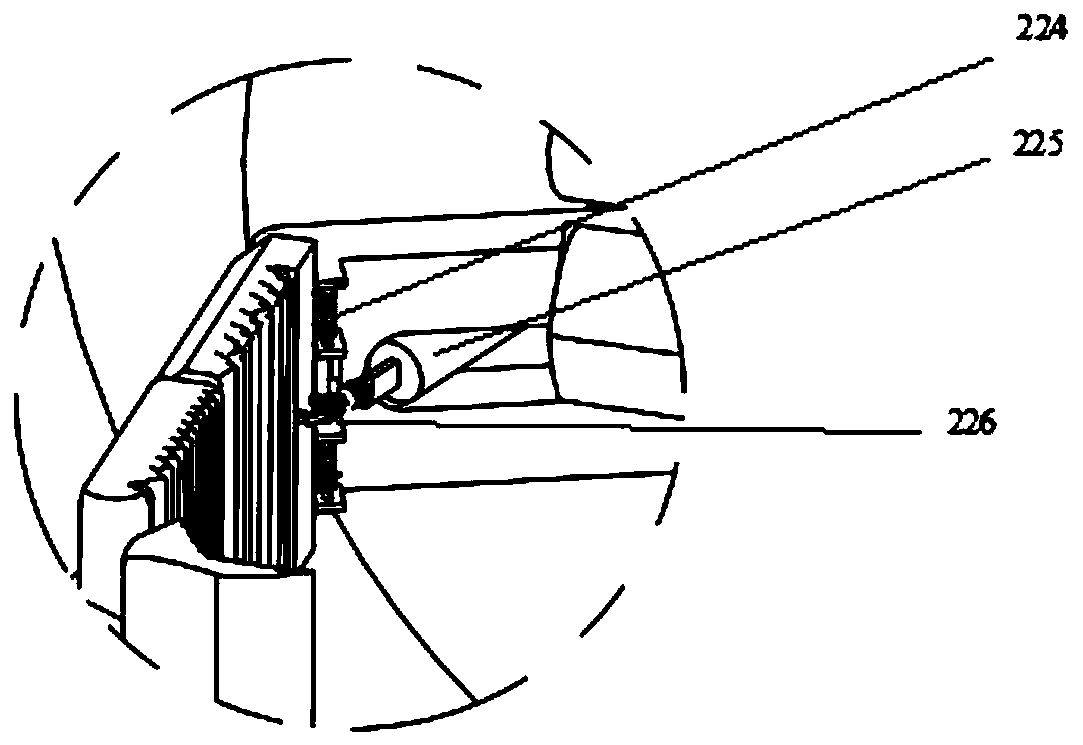
[0081] Such as Figure 6 As shown, the rotary flying picking robot based on four-degree-of-freedom multi-eye vision, in the picking process, firstly, the UAV 1 is on land, records the initial position, obtains the harvesting position Z through measurement, and obtains the fruit image through the positioning camera 42 , carry out position initialization; Open the telescoping link 21 of picking hand again, all stretch, open servomotor, rotate last joint bar 213, drive picking manipulator 22, make picking manipulator three fingers be inverted triangle shape (such as Figure 10 shown in the picking state), and through the wire, the joint ring 215 is de-energized, so that the spring 216 squeezes the sliding guide 217, and then resists the long rod 225, and the middle knuckle 222 turns outward. At this time, through the inside of the long rod The wire is used to control the entire extension of the middle phalanx, and the last phalanx 223 is everted to complete the picking and stretc...
Embodiment 3
[0083] Such as Figure 7 As shown in Figure b, the lower fruit is picked. When the upper fruit is to be picked again, it is not necessary to repeat the positioning. It is directly at the original position, the rear rotor speed is reduced, the front rotor speed is increased, the middle rotor speed remains unchanged, and the UAV pose After the change occurs, the backward movement is completed, the telescopic rod is extended, and the upper fruit can be reached, which is the pose in figure a. Main picking operation in this process is all identical with embodiment 2.
PUM
| Property | Measurement | Unit |
|---|---|---|
| Radius | aaaaa | aaaaa |
Abstract
Description
Claims
Application Information
 Login to View More
Login to View More