

Carrying device, site transfer control method, electronic equipment and storage medium
A handling device and handling equipment technology, applied in two-dimensional position/channel control, vehicle position/route/height control, lifting device, etc., can solve the problem that construction robots cannot transfer by themselves, low transportation efficiency, low degree of automation, etc. question
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
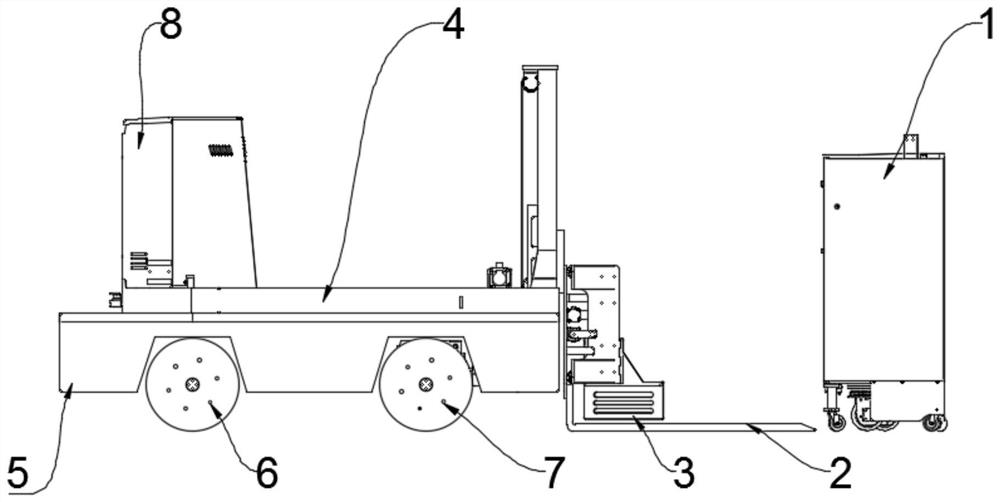
[0054] Please see figure 1 , figure 1 It is a schematic structural diagram of a handling device provided in the embodiment of the present application. As an example, the device can be an outdoor intelligent handling robot, which can be used to transport indoor working robots such as construction robots, and can also be used to transport materials in unmanned factories. The device can realize autonomous handling and transition without manual participation, improving the efficiency of transition. Specifically, the device may include:
[0055] A navigation and positioning module, used to plan a walking path according to the received map point cloud data, so as to navigate and locate according to the walking path;
[0056] The navigation and positioning module can communicate with the host computer or PLC controller, and connect with the transition system through 4G / 5G wireless Internet of Things network communication.
[0057] As one of the implementation manners, the navigat...
Embodiment 2
[0085] The embodiment of the present application provides a transition control method, which is applied to the handling device in Example 1. In order to facilitate the unified control of the handling robot, a transition system is established. By establishing the transition system, the construction robot can be included in the information The management system integrates the information flow of the location and status of the construction robot, realizes the dispatching system of the public transport mode, ensures that the construction robot can realize the mode of getting on and off the bus at a fixed point, and improves the transition efficiency of the construction robot.
[0086] The handling device has wireless communication, autonomous positioning, autonomous navigation and obstacle avoidance capabilities. For example, it can use 4G / 5G wireless IoT network to realize wireless communication with the transfer system, and accept the deployment and monitoring of the transfer syst...
Embodiment 3
[0108] An embodiment of the present application provides an electronic device, the electronic device includes a memory and a processor, the memory is used to store a computer program, and the processor runs the computer program so that the computer device performs the transition in Embodiment 2 Control Method.
[0109] An embodiment of the present application provides a readable storage medium, wherein computer program instructions are stored in the readable storage medium, and when the computer program instructions are read and run by a processor, the transition control method in Embodiment 2 is executed .
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More