

Multi-wheeled arm space robot facing large rolling target
A space robot and target technology, which is applied in the field of multi-wheel arm space robot and spacecraft space grasping end effector, can solve the problem of high fuel consumption, and achieve the effects of reducing energy consumption, stable capture, and easy realization
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
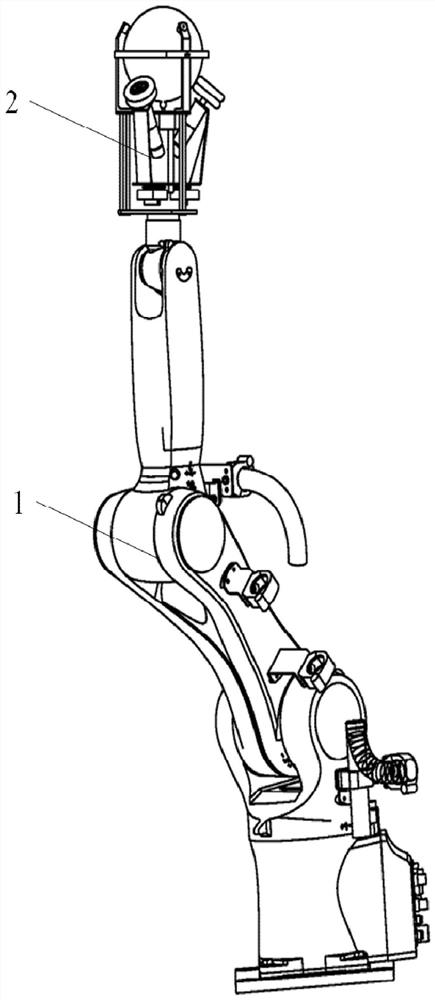
[0030] Such as figure 1 , 2 , a space robot with multi-wheeled arms facing a large rolling target, including a mechanical arm and an end effector of the mechanical arm; the end effector of the mechanical arm includes a mechanical arm 1 and an end effector 2; the end effector 2 is mounted on a end of arm 1;
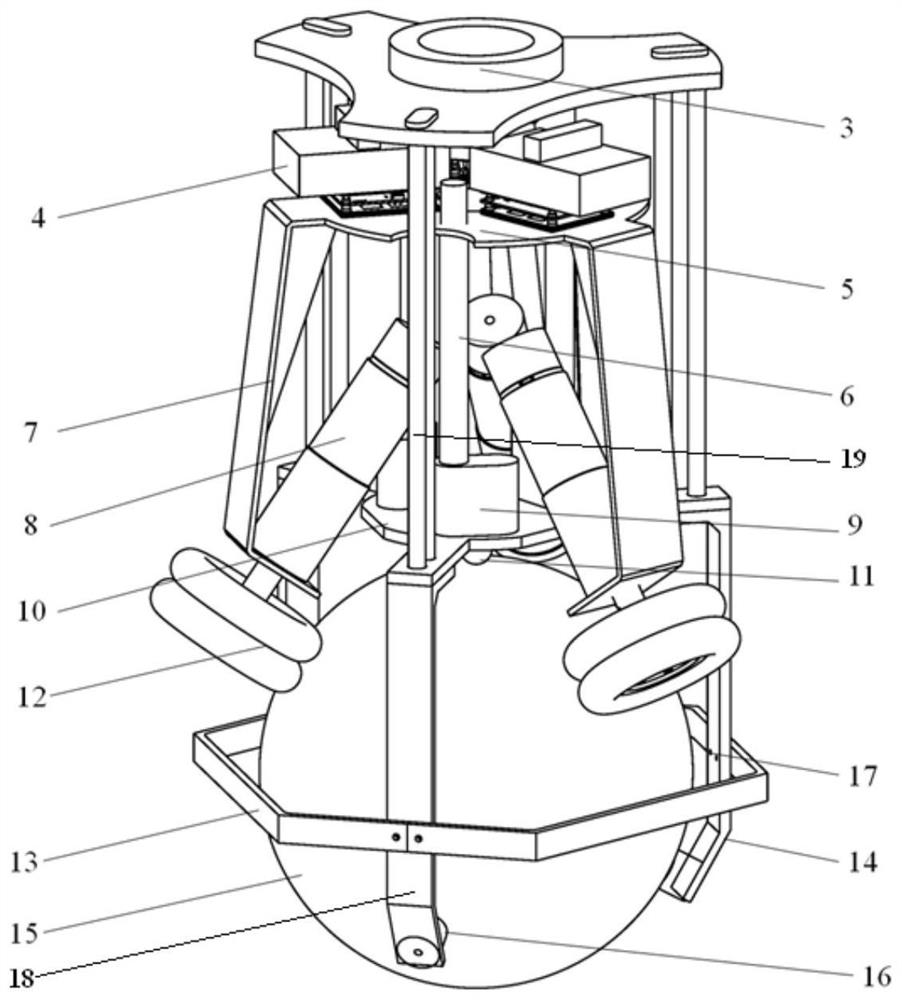
[0031] The end effector 2 includes an end effector mounting flange 3, a servo motor driver 4, a movable suspension 5, a linear module clutch system 6, a motor flange bracket 7, a servo motor 8, a linear module clutch driver 9, a fixed Suspension 10, limit ball bearing 11, Omni wheel 12, drive ball 15, omnidirectional bearing 16, laser measurement sensor 17 and drive ball support 18; One end of described motor flange support 7 is provided with movable suspension 5, so The movable suspension 5 is provided with a servo motor driver 4, and the other end of the motor flange bracket 7 is provided with a servo motor 8 and an omni wheel 12, and the servo motor 8 is used to contr...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More