Automatic propeller retracting device and method for unmanned aerial vehicle
An unmanned aerial vehicle and automatic technology, applied in the field of unmanned aerial vehicles, can solve the problems of increasing the weight and production cost of the unmanned aerial vehicle, and the complex structure of the unmanned aerial vehicle, and achieve the effect of reducing the occupied space.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
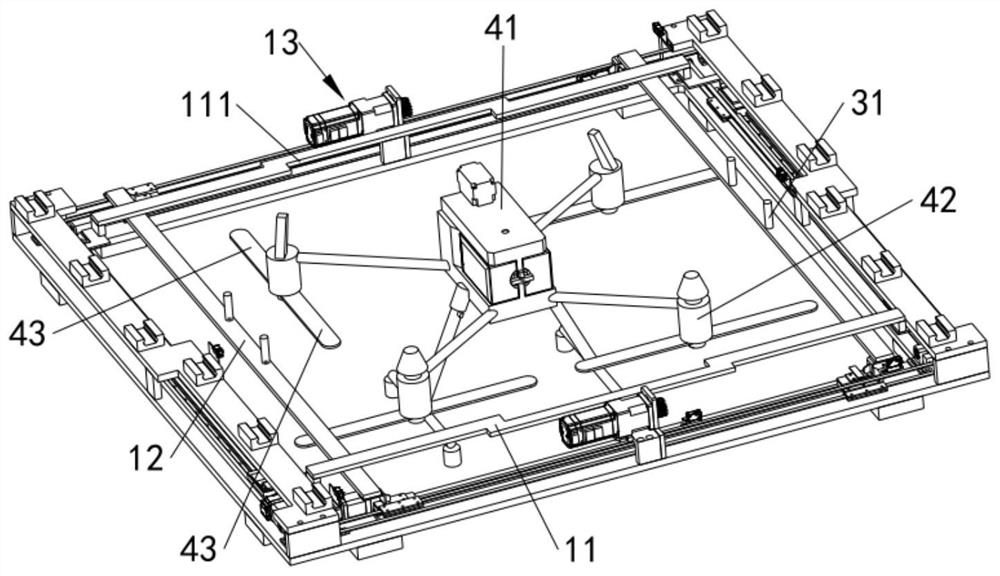
[0045] like Figure 1 to Figure 3 As shown, the UAV includes a fuselage 41 and a plurality of motors 42 distributed along the circumference of the fuselage 41 and connected to the fuselage 41 through paddle arms, and the output shaft of each motor 42 is connected with a Rotating or fixed paddles 43 . As for the structure for selectively rotating or fixing the paddle 43 relative to the output shaft of the motor 42, it is a prior art, and will not be repeated here. In order to avoid taking up a lot of space for UAV storage, the blades 43 are usually folded. The current automatic paddle retracting device has a complex structure, and the manual retraction of the paddles interferes with the automatic use of the UAV. Therefore, this embodiment provides an automatic propeller retracting device for unmanned aerial vehicles to solve the above technical problems.
[0046] The UAV automatic paddle retracting device provided in this embodiment includes a centering assembly and a paddle ...
Embodiment 2
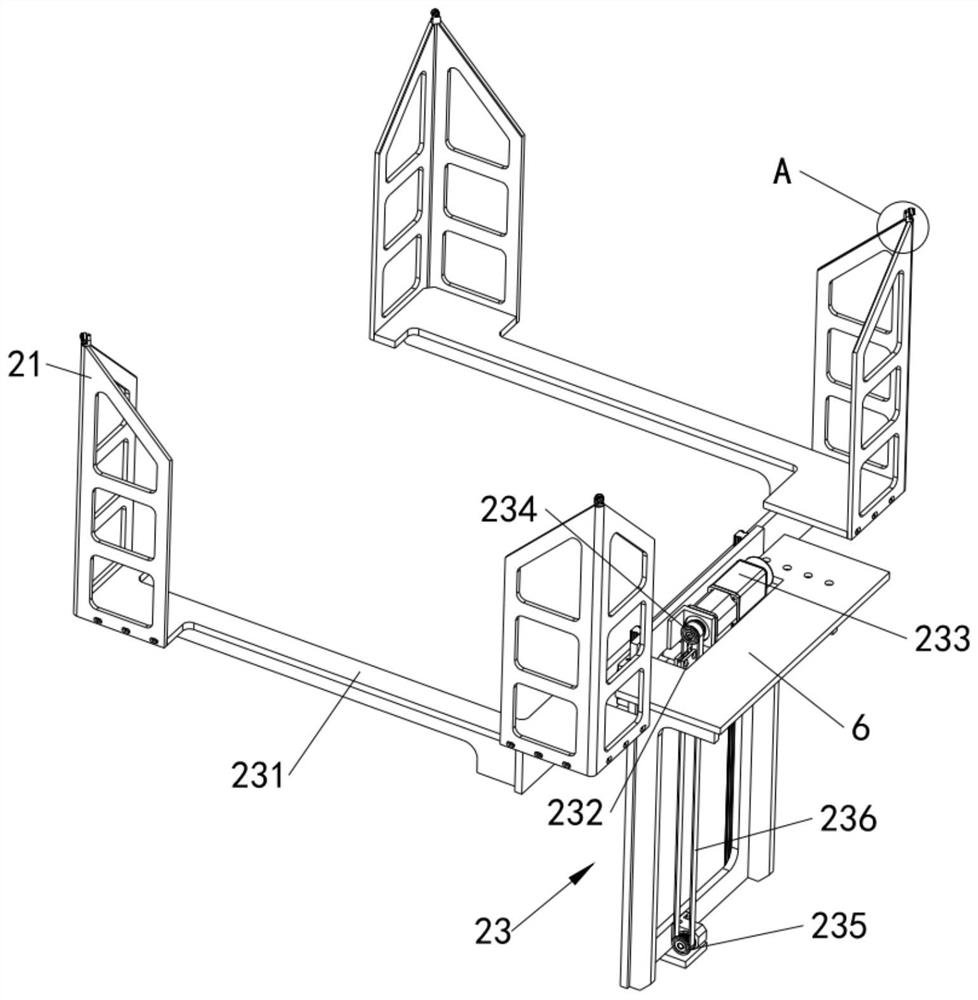
[0079] like Figure 4 and Figure 5 As shown, the difference between this embodiment and the first embodiment is that an elastic correcting component is added to replace the elastic correcting component of the first embodiment, so as to prevent the paddle 43 from stopping on the two paddle wedge surfaces 22 of the paddle sloping block 21 A problem that caused the failure to retract the propeller above the position of the sharp corner formed.
[0080] Specifically, the elastic alignment assembly includes a rotating shaft, a swing rod 51 and a torsion spring, wherein the rotating shaft is horizontally installed on the top of the paddle tilting block 21 and fixed relative to the paddle tilting block 21; the swing rod 51 is vertically arranged, and the swing rod 51 The lower end of the shaft is rotatably connected to the rotating shaft; the torsion spring connects the rotating shaft and the swing rod 51 , and the torsion spring is used to provide an external force to keep the swi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com